Гирокамера 13 (внутренняя рама) может поворачиваться ВО круг оси уу вместе с наружной рамой 12. При воздействии на стабилизатор внешнего возмущения, приложенного к оси уу, ось гироскопа zzначнет поворачиваться (прецессировать) вокруг оси хх, стремясь к совмещению с осью уу. Рама 12 гироскопа стабилизатора некоторое время не будет поворачиваться вокруг своей оси уу, так как ее удерживает гироскопический момент, который всегда равен по величине и противоположен по направлению внешнему моменту.
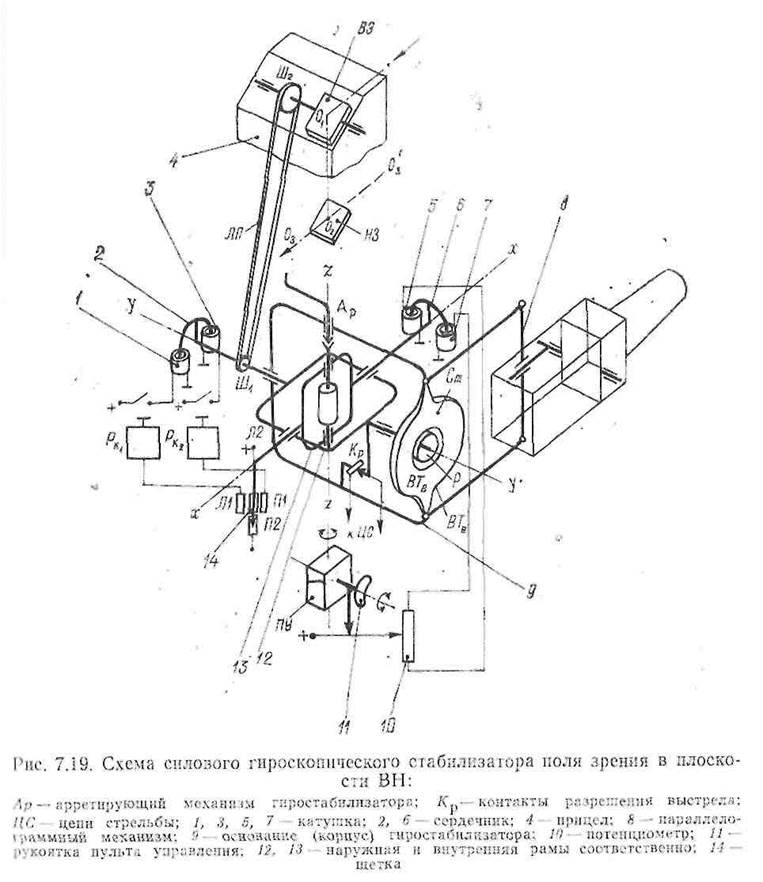
Возникшая прецессия оси zzстремится совместить эту ось Q осью у у и через некоторое время может привести к «заваливанию» гирокамеры гироскопа (оси zz) до упора, в результате чего гироскоп потеряет свои гироскопические свойства. Для предотвращения «заваливания» в стабилизаторе имеется коррекционное устройство. Оно состоит из щетки 14, контактных пластинок (ламе-лей) JI1, Л2, 111, П2 и двух пар катушек (одна из них показана на рис. 7.19) —катушки 1 и 3 с сердечником 2.
При воздействии на раму 12 гироскопа стабилизатора внешнего момента и с началом прецессии гирокамеры 13 вокруг оси хх щетка переходит с ламелей Л 2, П2 на одну из ламелей П1, Л1, вызывая срабатывание реле коррекции, которое включает соответствующую пару катушек. Ток, проходящий по катушке, создает электромагнитное поле, под действием которого сердечник втягивается в катушку, создавая коррекционпый момент вокруг оси уу и поворачивает на некоторый угол наружную раму 12. Этот момент больше внешнего момента и противоположно ему направлен, что заставляет гироскоп прецессировать в первоначальное положение. При этом щетка 14 возвращается на ламели Л2, П2, цепь питания катушек 1 и 3 разрывается, и действие коррекционного момента прекращается. Таким образом, обеспечивается стабилизация рамы 12. Для ее поворота вокруг оси уу служит система наводки, которая создает внешний момент, действующий вокруг оси хх. Этот момент зависит от угла поворота рукояток пульта управления ПУ вокруг горизонтальной оси.
|
|
Система наводки состоит из катушек 5 и 7, сердечника 6 и потенциометра 10 управления скоростью ВН. Катушки наводки закреплены на раме 12, а сердечник 6 — на гирокамере 13 стабилизатора.
При повороте рукоятки 11 пульта управления щетка потенциометра 10 смещается, в результате чего через соответствующую катушку проходит ток, сила которого зависит от угла поворота рукоятки ПУ. Катушка развивает момент, действующий на гиро-камеру вокруг оси хх, вызывая прецессию гироскопа вокруг оси стабилизации у у.
Учитывая, что значение момента, развиваемого катушкой, зависит от силы тока, а следовательно, и от угла поворота рукоятки, скорость наводки (прецессии) будет тем больше, чем больше угол отклонения этой рукоятки. Верхнее зеркало ВЗ с помощью ленточной передачи ЛП связано с наружной рамой гиростабилиза-тора.
Диаметры шкивов Ш1 и Ш2 относятся как 1 :2, т. е. при повороте наружной рамы стабилизатора на угол ср, головное зеркало повернется на угол сргз = ф/2. Если основание прибора поворачивается относительно стабилизированной рамы 12 гиростабилиза-тора на некоторый угол фк, то шкив Ш2 и связанное с ним головное зеркало повернется относительно неподвижного шкива U11 на угол фгз ='фк/2. Угол поворота головного зеркала относительно основания прибора будет при этом равен <ргз = — <рк/2.
В рассмотренной системе гиростабилизатор непосредственно связан с объектом регулирования — верхним зеркалом, — и для его стабилизации используется свойство гироскопа сохранять неизменным положение оси zzв пространстве (при отсутствии возмущающих моментов). Такие системы называются силовыми стабилизаторами поля зрения или линии прицеливания (СЛП).
Современные СЛП имеют высокую точность стабилизации: среднее квадратическое отклонение составляет 0,15.. .0,3 мрад. При наличии независимой стабилизации линии прицеливания в плоскости продольных угловых колебаний нет необходимости иметь отдельный гиродатчик стабилизатора пушки. Достаточно па наружной раме гироскопа системы СЛП установить ротор вращающегося трасформатора ВТВ, а его статор с помощью парал-лелограммного механизма связать с пушкой. В этом случае напряжение на выходе ВТВ будет пропорционально углу рассогласования б = флп — ф0 между линией прицеливания и осью канала ствола пушки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.