Вследствие неточной установки пуля измерительных элементов датчиков ГС, ДУ и ГТВ, несимметричности характеристик усилителей, а также в результате изменения параметров элементов В процессе эксплуатации привода на входе системы возникает статическая ошибка—дополнительный угол рассогласования. Для автоматического устранения этой ошибки в приводе вертикальной Наводки имеется специальное устройство — компенсатор К, который вырабатывает сигнал, пропорциональный ошибке, и передает его на вход ЭУ.
Для обеспечения устойчивости и повышения быстродействия привода в систему вводят гиротахометр ГТВ (двухстепенный гироскоп с ВТ), вырабатывающий сигнал, пропорциональный скорости колебаний пушки.
Привод наводки и стабилизации башни в плоскости ГН включает в себя:
датчик угла ДУ и гиротахометр ГТГ (см. рис. 7.23), находящиеся в гироблоке 3 (см. рис. 7.21), закрепленном под пушкой на нижнем листе ограждения;
усилители (электронный ЭУ и виброусилитель ВУ), размещенные в коробке К-1 (см. 23 на рис. 7.21), расположенной справа в башне за сиденьем командира;
гидронасос Н (см. И на рис. 7.21) и гидромотор большого момента ГБМ (см. 13 на рис. 7.21), расположенные в левой передней части корпуса танка;
датчик линейных ускорений ДЛУ (см. 17 на рис. 7.21), закрепленный на крыше башни, индуктивные датчики ДИ, установленные на кронштейне, прикрепленном к гидронасосу.
При стабилизации в плоскости ГН в качестве задающего устройства используется гироскопический датчик угла ДУ.
Башни отечественных танков являются существенно неуравновешенными (центр тяжести башни смещен от центра вращения I сторону оси цапф), поэтому при колебаниях башни в поперечной Плоскости танка появляется дополнительный возмущающий момент, стремящийся отклонить башню, а вместе с ней и пушку от заданного направления. С целью снижения влияния этого возмущения вводится дополнительный канал с датчиком линейных ускорений ДЛУ (см. рис. 7.23, б), сигнал которого суммируется с общим сигналом на входе электронного усилителя ЭУ.
Сигнал с ВТГ датчика угла поступает на электронный усилитель и через ВКУ подается на электромагнит управления гидроусилителя. Последний управляет насосом, который приводит в движение гидромотор, вращающий через редуктор башню.
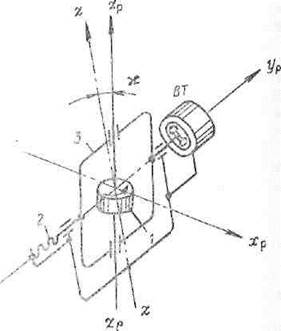
Элементы приводов наводки и стабилизации пушки и башни. Гиротахометр состоит из двухстепенного гироскопа, вращающегося трансформатора и демпфера.
|
|
Двухстепенный гироскоп состоит из ротора / (рис. 7.24), рамки 3 и торсиона 2. В установившемся режиме работы угол поворота рамки пропорционален скорости движения основания гироскопа. Это свойство используется для измерения абсолютной угловой скорости движения пушки (башни). Угол поворота у. преобразуется в электрический сигнал с помощью вращающегося трансформатора ВТ, ротор которого связан с осью рамки, а статор закреплен на основании. Для гашения колебаний рамки гироскопа в конструкцию датчика вводят электромагнитный демпфер.
Рис. 7.24. Датчик абсолютной угловой скорости вращения пушки и башни: 1 — ротор; 2 — торсион; 3 — рама
Гидроусилитель ГУ (см. рис. 7.22, б) предназначен для преобразования механической энергии приводного электродвигателя в энергию потока рабочей жидкости пропорционально сигналу управления. Он состоит из корпуса, гидронасоса, приводного электродвигателя и механизма управления. На корпусе снаружи закреплен приводной электродвигатель ПД, внутри корпуса в расточке соосно с электродвигателем закреплен гидронасос Н\ концы валов ПД и Я соединены с помощью втулки и шпонок. Наряду с этим внутри корпуса смонтированы блок управления и фильтр. Гидронасос аксиально-поршневой, нерегулируемый; приводится во вращение электродвигателем постоянного тока последовательного возбуждения, развивающим мощность 1 кВт при частоте вращения 1 700 об/мин.
Механизм управления предназначен для регулирования подаваемого от гидронасоса потока рабочей жидкости между полостями исполнительного цилиндра. Он состоит из корпуса,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.