погрешность (средние квадратические отклонения) стабилизации поля зрения прицелов в плоскостях ВН и ГН — 0,1. . .0,15 мрад; оружия в плоскостях: ВН — 0,25.. .0,3 мрад, ГН —0,4. ..0,6 мрад;
увод линии визирования прицелов (самопроизвольное смещение линии визирования от заданного положения за определенное время при отсутствии сигналов наводки)—не более 8 мрад/мин. Приводы наводки предназначены для придания оружию необходимого положения в пространстве. Наиболее распространенный способ наводки оружия — поворот платформы (башни, башенки, турельной установки), на которой оно установлено, в горизонтальной плоскости и самого оружия относительно платформы — в вертикальной. В соответствии с этим различают приводы вертикальной (ВН) и горизонтальной (ГН) наводки.
Чтобы повысить точность стрельбы с ходу, в состав приводов наводки включают устройство, обеспечивающее стабилизацию оружия и измерение его отклонений от заданного направления, а также регулятор, формирующий закон управления приводом в замкнутом контуре автоматического регулирования. Привод наводки с функцией стабилизации оружия называют стабилизатором танкового вооружен и я.
Стабилизаторы поля зрения прицелов. Независимая стабилизация поля зрения в СУО отечественных танков осуществляется тремя способами:
следящим приводом передачи угла в плоскости ВН в прицелах типа ТШС и ТШСМ (Т-55 и Т-62);
силовым гиростабилизатором в плоскости ВН в прицелах ТПД-К1 и ТПД2-49 (Т-72);
силовым гиростабилизатором поля зрения в двух плоскостях паводки в прицеле ПДПС (Т-64Б).
Два первых способа основаны на использовании гироскопа С тремя степенями свободы (трехстепенного гироскопа), а последний— на основе двухкомпонентной гирорамы с двумя двухстепенными гироскопами.
|
|
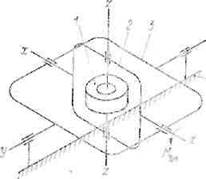
Гироскоп — это вращающийся с большой частотой вокруг оси симметрии zz(рис. 7.17) цилиндр (ротор), закрепленный в Специальном подвесе. Составными частями трехстепенного гироскопа являются ротор, внутренняя и наружная рамы. Ротор установлен в подшипниках, расположенных во внутренней раме. Внутренняя рама вместе с ротором может поворачиваться относительно оси хх, а наружная, установленная на основании,— относительно оси у у. Такую конструкцию подвеса ротора называют кардановы м подвесом. Таким образом, ротор в кардановом подвесе имеет возможность поворачиваться относительно трех взаимноперпендику-лярных осей и поэтому называется гироскопом с тремя степенями свободы (двухстепенный гироскоп состоит из вращающегося ротора и одной рамы).
Рис. 7.17. Схема трехстепенного гироскопа:
1—ротор; 2, 3 — внутренняя и наружная рамы соответственно; 4 — основание
Гироскоп обладает свойствами: сохранять неизменным
направление оси вращения ротора, оказывая сопротивление всякому усилию,
стремящемуся изменить это положение оси; при воздействии внешнего момента на
ось вращения какой-либо из рам подноса ось ротора поворачивается вокруг оси
вращения другой рамы. Такое движение называется прецессией. Так, если приложить внешний момент Мт вокруг
оси хх к внутренней раме, то гироскоп будет оказывать сопротивление
повороту этой рамы ![]() вокруг оси хх и будет поворачиваться вместе с наружной рамой вокруг оси уу. Скорость прецессии гироскопа
сопр определяется выражением сопр =Мт/Н, где
Я —кинетический момент гироскс) па.
Вследствие прецессии возникает гироскопический момент, Щ правленный
противоположно внешнему моменту, пропорциональный скорости прецессии и равный
приложенному внешнему моменту. Прецессия гироскопа вокруг оси уу мгновенно
прекращается после снятия внешнего момента
Мвн с оси хх. Аналогичное приложение момента к оси уу вызывает
прецессию гироскопа вокруг оси хх.
вокруг оси хх и будет поворачиваться вместе с наружной рамой вокруг оси уу. Скорость прецессии гироскопа
сопр определяется выражением сопр =Мт/Н, где
Я —кинетический момент гироскс) па.
Вследствие прецессии возникает гироскопический момент, Щ правленный
противоположно внешнему моменту, пропорциональный скорости прецессии и равный
приложенному внешнему моменту. Прецессия гироскопа вокруг оси уу мгновенно
прекращается после снятия внешнего момента
Мвн с оси хх. Аналогичное приложение момента к оси уу вызывает
прецессию гироскопа вокруг оси хх.
Компенсация моментов внешних сил соответствующими гиро скопическимн моментами называется гироскопическим э ф фектом, а свойство трехстепенного гироскопа длительно сохранять заданный угол поворота в пространстве относительно оси уу называется свойством стабилизации. Кроме внешнего момента Мвн, на гироскоп могут действовать моменты сил трения в подшипниках, неуравновешенности ротора и рам, вызывая прецессию гироскопа, которую называют уводом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.