Стабилизацию поля зрения со следящим приводом передачи угла (рис. 7.18) в плоскости ВН осуществляют: гироскопический датчик угла вертикальной наводки ДУвн, контур суммирования КС, вращающийся трансформатор обратной связи ВТ ос, усилитель Ус; исполнительный двигатель ИД, нижнее зеркало НЗ, электромагнит арретира ЭМа, релейно-переключающее устройство РПУ.
При гидростопорении пушки или выходе ее из режима стабилизации (резкий наезд на препятствие) статор Ст вращающегося трансформатора ВТВ датчика угла ДУвн поворачивается вместе с пушкой относительно неподвижного в пространстве ротора (Р). Это приводит к возникновению на выходе ВТВ напряжения Щ переменного тока несущей частоты. Амплитуда этого напряжения пропорциональна углу ср0 поворота пушки вместе со статором ВТ„ относительно ротора Р. Напряжение Uyподается на контур суммирования КС, к усилителю Ус и на релейно-переключающее устройство РПУ. При достижении определенного порога напряжения Uyсрабатывает РПУ и нижнее зеркало освобождается электромагнитом ЭМа.
К выходу усилителя Ус подключена обмотка управления исполнительного двигателя ИД, который через редуктор поворачивает нижнее зеркало НЗ прицела в направлении, противоположном направлению поворота головной части прицела (вместе С пушкой). Головная качающаяся часть прицела, в которую входя'1 нижнее зеркало ИЗ, верхнее зеркало ВЗ, объектив О и сетка с прицельными знаками, жестко связана с пушкой.
Вместе с зеркалом поворачивается и ротор вращающегося трансформатора обратной связи ВТ0с, па выходе которого возни каст напряжение ^втос переменного тока той же частоты, что и напряжение UrАмплитуда напряжения с/втос пропорциональна углу поворота срнз нижнего зеркала относительно корпуса прицела, а фаза определяется направлением поворота ротора ВТос относительно статора от согласованного (нулевого) положения. 11апряжение £/втос подводится к регулировочному потенциометру //ос, с которого часть этого напряжения подается в контур суммирования КС в противофазе с напряжением Uyот ВТВ датчика угла. Вращение нижнего зеркала продолжается до тех пор, пока напряжение Uycс выхода усилителя не станет равным нулю. При Пус =0 двигатель остановится. Масштабы напряжений (7вт0С и Ну подобраны таким образом, чтобы нижнее зеркало поворачивалось против движения корпуса прицела на угол: фцз = —0,5сро.При этом обеспечивается стабилизация изображения местности II плоскости ВН.
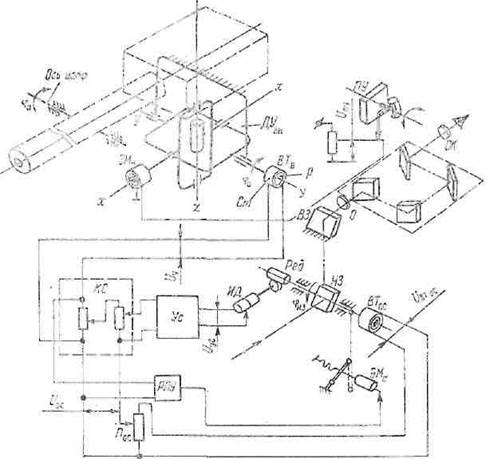
Рис. 7.18. Система стабилизации поля зрения со следящим приводом передачи угла
Наводка линии прицеливания в стабилизированном режиме осуществляется посредством принудительного поворота наружной рамки гироскопического датчика угла ДУвн- В этом режиме напряжение £/пу от пульта управления ПУ подается к электроды i киту наводки ЭМП. который создает момент относительно оси х внутренней рамки гироскопа ДУвн, вызывая прецессию наружно! рамки вокруг оси уу. Ротор ВТВ поворачивается относительно ста тора и на выходе ВТВ появляется напряжение Uy, пропорциональное углу рассогласования между ротором и статором. Следящая система отрабатывает это рассогласование, поворачивая нижи* зеркало на половинные углы относительно наружной рамки. При этом линия прицеливания будет параллельна оси хх внутренне! рамки (без учета погрешностей следящей системы). При установи пульта в нулевое положение зеркало мгновенно останавливается
При постоянном моменте наводки установившаяся угловая скорость нижнего зеркала будет в 2 раза меньше установившейся скорости прецессии наружной рамки датчика угла ДУ вн.
Стабилизация поля зрения в плоскости вертикальной наводи прицелов ТПД2-49 и ТПД-К1 осуществляется с помощью силового гироскопического стабилизатора, построенного так же, как датчш угла ДУвн на основе гироскопа с тремя степенями свободы (трех степенного гироскопа). Гироскоп в гиростабилизаторе ориентир» вам так, что ось гироскопа zzрасположена вертикально, а осм прецессии хх — параллельно оси канала ствола оружия (рис. 7.19).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.