Принцип роботи електрокерованого амортизатора наступний (рис. 3.16). У такому амортизаторі замість складної системи жиклерів і клапанів на поршні встановлений керуючий соленоїд (рис. 3.17), подаючи напругу на який можна змінювати в'язкість рідини в широких межах, а отже, регулювати зусилля стиску і відбою. В'язкість рідини в зазорі залежить від сили струму в котушці і задає потрібну силову характеристику всього амортизатора. При порівняльних випробуваннях автомобіля з традиційними і керованими амортизаторами (вітчизняними) з'ясувалося, що амплітуда коливань непідресореної маси знижується до 30%, тривалість перехідного процесу скорочується в 2,5 рази, а зусилля демпфірування зростає в 2…3 рази.

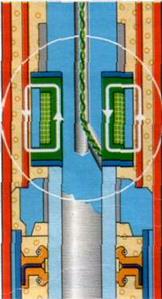
Рис. 3.16. Амортизаторна стійка Рис. 3.17. Амортизаторна ззовні стійка зсередини.
Застосування на легкових автомобілях описаних вище конструкцій телескопічних амортизаторів хоча і дозволяє значно поліпшити їх зовнішні характеристики, однак має один істотний недолік – високу вартість, що обумовлюється, як вартістю самого амортизатора так і необхідністю установки додаткового оснащення – компресорів і електронних інформаційних блоків.
У той же час конструкція сучасних гідравлічних телескопічних амортизаторів має кілька позитивних моментів, серед яких можна виділити порівняно низьку вартість при достатній надійності і ремонтопридатності.
Отже – дослідження в напрямку збільшення надійності таких амортизаторів є актуальними і своєчасними.
3.7. Перевірочний розрахунок гідравлічного амортизатора передньої стійки.
Перевірочний розрахунок амортизатора проводимо на прикладі амортизатора передньої стійки (типу “Mac-Ferrsоn”) автомобіля ЗАЗ-1102 “Таврія”.
Попередній перевірочний розрахунок амортизатора полягає у виборі і перевіренні визначення основних його розмірів, прохідних перетинів для перепуску рідини і параметрів пропускних клапанів.
У перевірочний розрахунок входить визначення характеристик амортизатора і теплового режиму його роботи.
Вихідним параметром служить коефіцієнт
загасання ![]() коливань чи
коливань чи ![]() , знайдений
при розрахунку схеми підвіски.
, знайдений
при розрахунку схеми підвіски.
Відповідно до формул теорії за коефіцієнтами згасання можуть бути знайдені коефіцієнти опору амортизаторів, приведені до осей коліс.
Так, якщо для автомобіля за основу для розрахунків прийняті подовжні кутові коливання, то, вважаючи опір всіх амортизаторів однаковими, знайдемо приведений коефіцієнт для кожного з них за формулою:
 ,
(3.1)
,
(3.1)
де ![]() -
коефіцієнт затухання повздовжніх кутових коливань;
-
коефіцієнт затухання повздовжніх кутових коливань;
![]() -
частота власних кутових коливань. Приймаємо з умов комфортності для автомобіля
ЗАЗ-1102 “Таврія”
-
частота власних кутових коливань. Приймаємо з умов комфортності для автомобіля
ЗАЗ-1102 “Таврія” ![]() = 10 рад/сек;
= 10 рад/сек;
![]() .
.
![]() — момент інерції
корпуса. Приймаємо для кузова автомобіля ЗАЗ-1102 “Таврія”
— момент інерції
корпуса. Приймаємо для кузова автомобіля ЗАЗ-1102 “Таврія” ![]() = 9,35 кНм [ ];
= 9,35 кНм [ ];
![]() — число амортизаторів
одного борта, яким необхідно задатися; приймаємо
— число амортизаторів
одного борта, яким необхідно задатися; приймаємо ![]() амортизатора.
амортизатора.
![]() — відстань в метрах від
центра ваги корпуса до 1-го (один за одним) амортизатора (приймаємо за схемою
наведеною на рис. 3.18).
— відстань в метрах від
центра ваги корпуса до 1-го (один за одним) амортизатора (приймаємо за схемою
наведеною на рис. 3.18).
 |
Рис. 3.18. Схема розміщення амортизаторів від центра ваги
автомобіля ЗАЗ-1102 “Таврія” (в метрах)
Отже  .
.
Від приведеного коефіцієнта необхідно перейти до дійсного, користуючись кінематичною схемою підвіски. Так, при установці телескопічного гідравлічного амортизатора в незалежному вузлі підвіски, показаному на рис. 3.18 (така конструктивна схема застосовується на автомобілі ЗАЗ-1102 “Таврія”), дійсний коефіцієнт опору дорівнює:
 .
(3.2)
.
(3.2)
Розміри ![]() і
і ![]() показані
на рис. 3.19. За технічними даними автомобіля ЗАЗ-1102 “Таврія” величина
показані
на рис. 3.19. За технічними даними автомобіля ЗАЗ-1102 “Таврія” величина ![]() , а
, а ![]() . Опір
амортизатора вважаємо пропорційним першому ступеню швидкості переміщення
поршня.
. Опір
амортизатора вважаємо пропорційним першому ступеню швидкості переміщення
поршня.
Рис. 3.19. Установка вузла амортизатора
Найбільше зусилля, що діє на поршень, визначаємо через максимальну швидкість поршня; останню знаходимо за максимальною швидкістю переміщення колеса, яка дорівнює:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.