Существует класс объектов, требующих точной настройки и не допускающих сбоев или нарушений в работе. С этих позиций, а также на основании требований ТЗ, рассчитывают коэффициенты регулятора с допустимой погрешностью. Однако ни одна модель точно не соответствует реальному объекту. С этой позиции можно сделать вывод, что реализованный регулятор может и не давать в реальной системе удовлетворительный или оптимальный переходный процесс. Поэтому необходимо иметь грубые настройки регулятора, которые при малых девиациях параметров объекта сильно не нарушали качества переходного процесса. Поэтому регулятор необходимо реализовывать с возможностью подстройки его параметров к реальной системе.
Повышение точности: 1) увеличение коэф усиления разомкнутой цепи, 2) повышение степени астатизма, 3) применение регулирования по производным от ошибок. структурно надо ввести как минимум ПИ-регулятор
П – регулятор уменьшает статическую ошибку. При чрезмерном увеличении К система становится неустойчивой.
∆=1/(1+КК0).
И – регулятор снижает запас устойчивости, и привносит сдвиг фаз -900.
∆=0
Д – регулятор увеличивает запас устойчивости системы, и привносит сдвиг фаз +900.
Для астатических систем характерным является режим линейной заводки, когда V=at. В этом случае возникает «скоростная» ошибка ∆0с = a/КК0. Эта ошибка уменьшается, если увеличивать К0.
В следящих системах статическая ошибка порождается возмущением и уменьшается путем увеличения К0. В режиме линейной заводки скоростная ошибка ∆0с = a/КК0 – М/К0 уменьшается путем увеличения К0. Однако уменьшить в данном случае скоростную ошибку до 0 нельзя, т.к. наличие 2-х или более интеграторов в системе делают ее структурно неустойчивой.
Статическая ошибка – постоянное отклонение выходной величины от задающего воздействия в установившемся режиме.
|
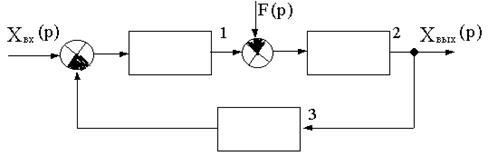
Рассмотрим одноканальную систему стабилизации, для которой входное воздействие является постоянной величиной, а цель регулирования состоит в организации свойства limy(t)=V. Для оценки точности используется ошибка регулирования ∆(t)= V- y(t), которая с течением времени стремится к некоторому постоянному значению – статической ошибке. ∆0=lim∆(t). По известной структурной схеме системы ошибку можно определить в операторной форме с помощью структурных преобразований ∆(p) = V(p) – y(p). В этом случае статический режим характеризуется тем, что p=0, а статическая ошибка находится по выражению ∆0 = ∆(0). Динамической ошибкой будем называть величину ∆d(t)=∆(t)-∆0, причем lim∆d(t)=0. |
Наличие статической ошибки в общем случае является нежелательным, так как создается погрешность управления. Но для полного устранения статического отклонения требуется до бесконечности увеличивать коэффициент передачи k, что нереализуемо по ряду причин (например, по условию обеспечения устойчивости). Таким образом, в статической САУ принципиально нельзя полностью устранить статическую ошибку.
Статическими
погрешностями измерения называют погрешности, возникающие при определении
постоянного во времени измеряемого значения. При этом предполагается, что все
переходные процессы в измерительном устройстве завершены; следовательно,
измерительный прибор и измеряемая величина находятся в установившемся
состоянии. Если проводить многократные независимые измерения, то возникает
ситуация, при которой можно различать два принципиально отличающихся вида
погрешностей, так называемые систематические и случайные погрешности.
Систематическую погрешность Еs определяют как отклонение действительного
измеряемого значения от среднего значения (математического ожидания) : Еs = μ
– х. Математическое ожидание μ является средним значением бесконечного числа
измерений:  . При одинаковых условиях эта погрешность всегда имеет ту
же самую абсолютную величину и тот же самый знак. В противоположность этому ни
абсолютная величина, ни знак отклонения отдельного измерения от математического
ожидания не могут быть предсказаны заранее. Эта случайная погрешность
обозначается через Еai.
Она соответствует разности между показанием единичного измерения и
математическим ожиданием: Еаi = хаi – μ.
. При одинаковых условиях эта погрешность всегда имеет ту
же самую абсолютную величину и тот же самый знак. В противоположность этому ни
абсолютная величина, ни знак отклонения отдельного измерения от математического
ожидания не могут быть предсказаны заранее. Эта случайная погрешность
обозначается через Еai.
Она соответствует разности между показанием единичного измерения и
математическим ожиданием: Еаi = хаi – μ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.