· Параметры системы в области средних и низких частот заметно улучшаются, при этом не имеет существенного значения тот факт, что ВЧ часть сигнала управления замыкается не через объект.
· Ответвления управляющего сигнала на обводной канал в низкочастотной и среднечастотной областях не влияют на точность управления в силу малости значения а.ч.х. обводного канала в сравнении с а.ч.х. объекта на этих частотах.
24 продолжение
Пример:
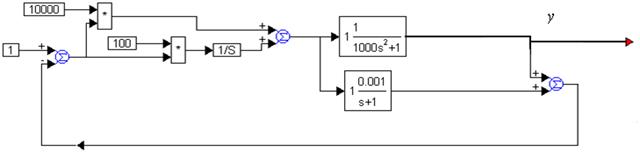
Модель системы стабилизации колебательного звена регулятором с обводным каналом
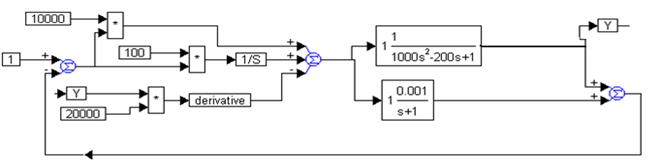
Устранение
перерегулирования в системе с обводным каналом за счет применения
дифференцирующего канала
Точность САУ оценивается показателями, которые в совокупности называется качеством управления. Показатели качества системы автоматического регулирования, величины, характеризующие точность, с которой система автоматического регулирования выполняет оптимальный технологический процесс и необходимый режим работы машины или механизма. Важнейшие показатели качества САУ: статические, динамические погрешности и время регулирования.
При действии на САУ случайных возмущений наиболее распространён критерий качества динамической точности — средняя квадратичная ошибка. Эта величина относительно просто может быть связана со статистическими характеристиками возмущающих воздействий и параметрами передаточной функции системы. До начала разработки системы управления сообщаются необходимые для этого исходные данные: свойства управляемого объекта, характер действующих на него возмущений, цель управления и требуемая точность управления. К объекту управления относится его управляющий орган, через который передаётся воздействие на объект от управляющего устройства. Известные характеристики управляющего органа сразу же определяют характеристики исполнительного механизма управляющего устройства. Но на этом обрывается цепь частей системы управления, свойства которых определяются однозначно их взаимным влиянием друг на друга. Так вводится понятие неизменяемой части системы управления — неизменяемой в том смысле, что свойства её заданы до начала конструирования алгоритма управления и, как правило, не могут быть изменены. Заданная цель управления определяет и способ управления. В результате выясняется в общих чертах блочная схема системы управления.
Для линейных систем справедливо утверждение: «Если перерегулирование превысило 100%, то переходный процесс неустойчив».
ОЧЕВИДНО: «Никакое решение с неустойчивым переходным процессом не может быть удовлетворительным». Но алгоритм поиска минимума стоимостного критерия качества в ПО VisSim отнюдь не прерывает поиск в этом случае. ЦЕЛЕСООБРАЗНО ОГРАНИЧИТЬ ПЕРЕРЕГУЛИРОВАНИЕ.
1. ОГРАНИЧЕНИЕ ВЕЛИЧИНОЙ 100%.
Блокирование перерегулирование более 100,0%:
Применим нелинейность типа «Зона нечувствительности» с шириной 2,002. Т.е. от -1,001 до +1,001. ТОГДА:
1) Если ошибка лежит в пределах диапазона -100,1%...+100,1%, то на выходе нелинейности – НУЛЬ;
2) Если ошибка выйдет за диапазон -100,1%...+100,1%, то на выходе возникает НЕНУЛЕВАЯ разница между ошибкой и этой пороговой величиной.
3) Эту разницу выпрямляем и усиливаем, например, в 1000 раз, и прибавляем к модулю ошибки.
Как следствие – блок оценки стоимостной функции вырабатывает величину, которая резко возрастает за счет этой добавки. Стоимостная функция резко растет в случае невыполнения требований по ограниченному значению перерегулирования. Следовательно, а этом направлении итерация коэффициентов далее не идет. Как результат, скорость и эффективность процедуры оптимизации возрастает.
ЦЕЛЕСООБРАЗНО ОГРАНИЧИТЬ ПЕРЕРЕГУЛИРОВАНИЕ даже не величиной 100%, а ЛЮБОЙ НАПЕРЕД ЗАДАННОЙ ВЕЛИЧИНОЙ. В этом случае ограничение диапазона поиска коэффициентов ПИД-регулятора уже не столь необходимо.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.