1) расчет был элементарно прост;
2) внесение задержки было пренебрежимо малым и не влияло даже с учетом обратной связи на точность результата.
Пренебречь задержкой на время шага интегрирования можно лишь в том случае, если задержка в самом объекте существенна, не нулевая. Следовательно, имитационным моделированием не корректно моделировать безынерционные звенья.
Шаг интегрирования должен быть не больше самой маленькой постоянной времени объекта или регулятора, иначе моделирование объектов с такими постоянными времени будет недостоверным. При настройке регулятора нужно это помнить.
Например, увеличение пропорциональной составляющей регулятора равносильно уменьшению постоянной времени интегратора:
Таким образом, после настройки параметров регулятора может оказаться, что постоянная времени, в данном случае, интегратора станет меньше выбранного шага интегрирования. Поэтому по окончании настройки регулятора, необходимо убедиться в корректности шага интегрирования, изменив его в большую или меньшую сторону. Если при этом переходный процесс в системе изменится качественно, то это будет свидетельствовать о том, что шаг выбран некорректно. Его необходимо уменьшить.
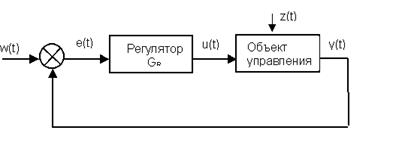
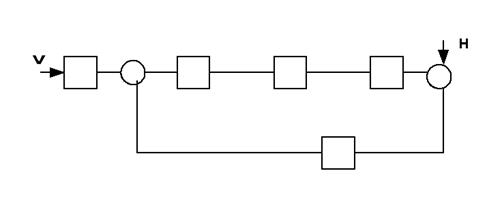
Принцип симуляции (Simulation) – каждый элемент формирует отклик на входные воздействия в зависимости от своей модели и от своего состояния.
Шаг интегрирования – малый интервал времени, на котором рассчитывается отклик. Он должен быть настолько мал, чтобы:
1. расчет был элементарно прост;
2. внесение задержки было пренебрежимо малым и не влияло даже с учетом обратной связи на точность результата.
Пренебречь задержкой на время шага интегрирования можно лишь в том случае, если задержка в самом объекте существенна, не нулевая. Следовательно, имитационным моделированием не корректно моделировать безынерционные звенья.
Шаг интегрирования должен быть не больше самой маленькой постоянной времени объекта или регулятора, иначе моделирование объектов с такими постоянными времени будет недостоверным. При настройке регулятора нужно это помнить.
Например, увеличение пропорциональной составляющей регулятора равносильно уменьшению постоянной времени интегратора:
Таким образом, после настройки параметров регулятора может оказаться, что постоянная времени, в данном случае, интегратора станет меньше выбранного шага интегрирования. Поэтому по окончании настройки регулятора, необходимо убедиться в корректности шага интегрирования, изменив его в большую или меньшую сторону. Если при этом переходный процесс в системе изменится качественно, то это будет свидетельствовать о том, что шаг выбран некорректно. Его необходимо уменьшить.
При исследовании нелинейных систем единичное ступенчатое воздействие не всегда может адекватно описать свойства системы, так как некоторые свойства могут не проявиться. Более показательной в данном случае будет реакция системы на плавноизменяющийся либо линейно нарастающий сигнал.
Ступенчатое воздействие может не содержать высокочастотных гармоник, поэтому высокочастотные свойства объекта могут не проявиться. Более показательным будет переходный процесс от дельта-функции.
Если структура одноконтурная, то не зависимо от места приложения входного воздействия (ступеньки), результаты в принципе будут иметь одинаковый качественный характер.
В системах содержащих более одного контура, если требуется изучить, как система отрабатывает помеху, то лучше смотреть реакцию на помеху, если требуется изучить, как отрабатывается управление, то лучше подавать управление.
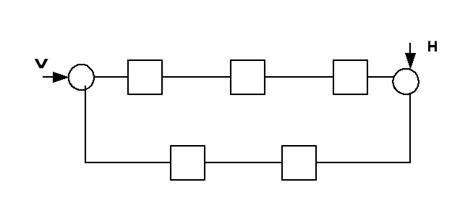
Если система приводится к виду
то реакция на ступеньку также неинформативна. Система не должна приводиться к структуре, когда вне контура стоит, например, какой-то фильтр.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.