При описании и последующем построении модели в среде VisSim нет необходимости записывать и решать дифференциальные уравнения, программа это сделает сама по предложенной ей исследователем структуре системы и параметрам ее элементов. Результаты решения выводятся в наглядной графической форме. Поэтому программой могут пользоваться и те, кто не имеет глубоких познаний в математике и программировании.
При использовании VisSim 'а не требуется владеть программированием на языках высокого уровня или ассемблере. В то же время, специалисты, владеющие программированием, могут создавать собственные блоки, дополняя ими богатую библиотеку стандартных блоков VisSim'а.
Моделирование систем управления это далеко не весь круг задач, которые можно решать в VisSim. Например, в этой программе при желании можно решать дифференциальные уравнения и VisSim делает это значительно эффективнее и быстрее, чем известная программа математической направленности MathCAD. При соизмеримой и более высокой производительности, чем у программы Simulink, входящей в пакет MathLab, VisSim занимает в сотни раз меньше места на жестком диске и в оперативной памяти. VisSim позволяет также решать задачки по физике, начиная с уровня школьных и кончая серьезными физическими экспериментами на виртуальных лабораторных стендах.
Интерфейс программы позволяет пользователю общаться с ней. С точки зрения исследователя интерфейс программы VisSim представляет собой интерактивный виртуальный лабораторный стенд, обеспечивающий построение моделей из отдельных блоков, запуск процесса моделирования, управление им и контроль результатов.
Блоки VisSim’а можно условно разделить на три основных категории и одну дополнительную:
· Блоки, имеющие только выход: генераторы (step, sinusoid и др.).
· Блоки, имеющие вход и выход: преобразователи (transferFunction, gain и др.).
· Блоки, имеющие только вход: индикаторы.
§ Осциллограф (plot)
§ Цифровой индикатор (display)
§ Стрелочный прибор (meter)
· Блоки без входов и выходов: надписи (label), комментарии и др.
Изменение шага интегрирования в небольших пределах не должно менять вида переходного процесса (шкала времени масштабируется, если дана в единицах шага интегрирования, но сохраняется, если дана в единицах времени).
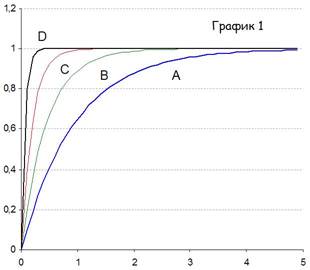
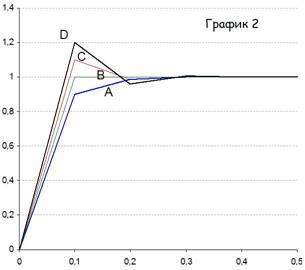
Шаг интегрирования следует выбирать таким, чтобы приращение между двумя соседними точками было пренебрежимо малым. В противном случае интегрирование будет осуществляться некорректно. Известно, что интегратор, охваченный пропорциональной обратной связью, представляет собой апериодическое звено. Такая система всегда устойчива. Это можно наблюдать на графике 1 при разных значениях k. Если этот коэффициент далее уменьшать, то переходный процесс будет строиться корректно. Если же коэффициент увеличивать, то переходный процесс будет строиться некорректно (график 2).
|
A) k = 1, B) k = 2, C) k = 4, D) k = 8 |
A) k = 9, B) k = 10, C) k = 11, D) k = 12 |
Однако, если наряду с увеличением коэффициента усиления уменьшить шаг интегрирования, то опять можно получить корректно рассчитанный переходный процесс.
Если при изменении шага интегрирования вид переходного процесса не меняется, то это также косвенно свидетельствует, что шаг интегрирования выбран корректно. Если же при этом вид переходного процесса меняется (а тем более – принципиально меняется), то это указывает, что шаг интегрирования слишком велик, и его следует значительно уменьшить.
Метод контроля правильности выбора
Есть критерий аналитический. Он состоит в том, что наименьшая постоянная времени, деленная на коэффициент усиления контура, должна быть намного больше, чем шаг интегрирования. Например, наименьшая постоянная времени 0,1с, коэффициент усиления 1000, тогда шаг интегрирования должен быть меньше, чем 0,0001.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.