Допустим, у объекта есть выходная величина Х и у него есть два входа, которые имеют разные быстродействия или разные коэффициенты. То есть это могут быть два способа воздействия на одну и ту же величину. Например, если мы стабилизируем температуру, у нас есть два прибора – нагреватель и прибор, который подводит или отводит тепло. Это два исполнительных устройства, которые имеют разные быстродействия. И это необходимо учесть, чтобы разделить движения. Один прибор будет медленным, другой – быстрый. В той области, где мы хотим, чтобы работал быстрый исполнительный элемент, должна быть АЧХ этого контура выше, чем АЧХ параллельного канала на другом элементе.
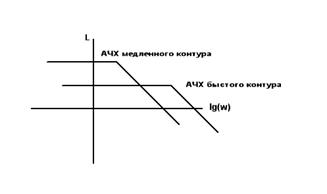
Если мы хотим, чтобы в каком-либо диапазоне работал быстрый/медленный контур, то в этой области частот АЧХ быстрого/медленного контура должна быть много больше АЧХ медленного/быстрого контура. А на графике она должна располагаться выше.
В реальных системах из-за наличия звеньев с малыми инерционностями могут возникать различные по темпу процессы. При определенных условиях можно пренебречь влиянием малых инерционностей. Косвенными признаками наличия в системе разнотемповых процессов могут служить имеющиеся в системе большие коэффициенты или малые постоянные времени.
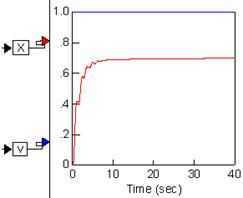
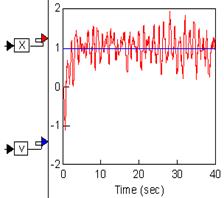
При использование малошумящего датчика для управления переходный процесс на выходе системы получается со статическим смещением. А при использование зашумленного датчика с малым смещением, получаем переходный процесс без статического смещения, но очень зашумленный. При совмещение достоинств этих двух датчиков, получаем наилучший результат.
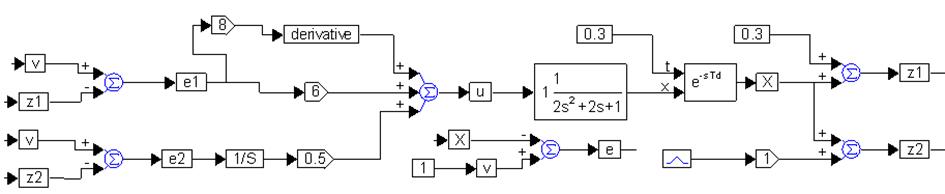
Z1 – выход объекта с использованием малошумящего (но не стабильного) датчика
Z2 – выход объекта с использованием стабильного (но зашумленного) датчика
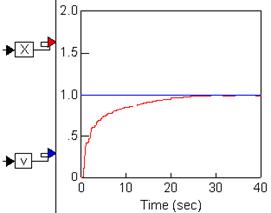
(а) (б) (в)
Переходный процесс при использовании обоих датчиков (а), только малошумящего датчика (б), только зашумленного с малым смещением (в).
В области низких частот используются свойства датчика с малым дрейфом, в области высоких частот свойства малошумящего датчика. Метод разделения движений позволяет тем самым совместить достоинства малошумящих (но нестабильных) и зашумленных (но стабильных) датчиков.
Идея обводного канала:
 |
, где W0(s) - передаточная функция объекта, а Wok(s) – передаточная функция обводного высокочастотного канала
В области низких частот:
![]()
В области высоких частот:
![]()
В результате достигаются следующие преимущества:
1) расширение полосы частот системы, т.е. границы области положительных значений логарифмической а.ч.х.;
2) увеличение общего коэффициента усиления системы во всем диапазоне частот, что дополнительно повышает глубину подавления помех в диапазоне низких и средних частот и повышает точность системы;
3) независимость устойчивости системы от особенностей а.ч.х. объекта в ВЧ области.
Традиционная схема с последовательным регулятором
(а) (б)
Снижение наклона ЛАЧХ дифференцированием в системе с последовательным регулятором (а), ограниченность возможностей снижения наклона ЛАЧХ при использовании последовательного регулятора (б).
Структурная схема системы с обводным каналом
(а) (б)
Исправление ВЧ части ЛАЧХ за счет обводного канала, действует принцип: суммарная ЛАЧХ задается ОГИБАЮЩЕЙ (а); Эффективность обводного канала сохраняется при высоком порядке объекта
Вывод:
· Обводной тракт дополняет объект до широкополосного звена, что позволяет упростить управление и достигать заметных улучшений динамических и статических свойств системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.