Введением дифференцирования добиваемся уменьшения перерегулирования, результат контролируем по целевой функции. Вводим пропорциональный, а затем и интегральный коэффициент, пока не начнет расти целевая функция. Т.е. суть метода в том, что мы меняем один коэффициент до тех пор, пока результат не начнет ухудшаться, в этом случае мы прекращаем менять этот коэффициент и беремся за следующий.
Лучше всего производить изменения коэффициентов с равным логарифмическим шагом – 2N – таким образом за конечное количество шагов всегда можно выбрать удовлетворительный вид переходного процесса.
ПИД-регулятор
Пропорциональная составляющая устраняет динамическую ошибку в значении стабилизируемой величины.
Интегральная составляющая. Для устранения статической ошибки используют интегральную составляющую. Она позволяет регулятору «учиться» на предыдущем опыте.
Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, которые могут произойти в будущем. Снижает перерегулирование.
При параллельном включении двух звеньев, суммарная АЧХ фактически равна большей из этих АЧХ, а ЛАЧХ будет огибающей.
Если мы хотим обеспечить разделение движений по частотам, то мы должны обеспечить в той области, где работает контур быстрых движений, преобладание АЧХ быстрого контура. И наоборот.
При использование малошумящего датчика для управления переходный процесс на выходе системы получается со статическим смещением. А при использование зашумленного датчика с малым смещением, получаем переходный процесс без статического смещения, но очень зашумленный. При совмещение достоинств этих двух датчиков, получаем наилучший результат.
Если мы хотим обеспечить разделение по двум датчикам, у одного – малые шумы, у другого – большой сдвиг, то это вызывает необходимость построить такую систему, у которой НЧ АЧХ была бы от датчика с малым дрейфом, а ВЧ АЧХ определялась бы датчиком с малыми шумами. При проектировании системы нужно сделать контуры так, чтобы контур, содержащий датчик с малым дрейфом в НЧ имел больший коэффициент усиления, а контур, содержащий датчик с малыми шумами в области ВЧ имел больший коэффициент усиления.
Графики должны быть представлены в таких осях, чтобы можно было разглядеть суть каждого фрагмента.
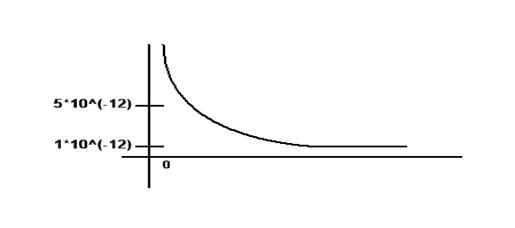
Для анализа погрешности САУ необходимо корректное представление графиков переходного процесса. Под корректным представлением графиков переходного процесса понимается такой график, где самому переходному процессу отводится не менее половины всего графика, а остальная половина установившемуся режиму. На рис. 1 представлен корректный график переходного процесса, на рис. 2 – некорректный, т.к. переходный процесс незакончен. Величина статической ошибки в установившемся режиме не должна превышать 5% от величины входного воздействия.

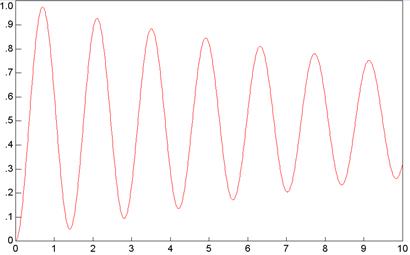
Рис. 1. Корректное представление Рис.2. Некорректное представление
Представляемые графики должны быть наглядными. Изображение ступенчатого переходного процесса, на котором нельзя рассмотреть длительность переходного процесса, является ненаглядным и потому бессмысленным. Следует выбирать такой масштаб по оси времени, чтобы особенности графика были наглядно видны. При изображении графика ошибки следует также выбирать такой масштаб по оси ординат, чтобы особенности переходного процесса были наглядно видны.
В случае, если фронт переходного процесса занимает по длительности время, равное одному шагу интегрирования, следует сделать вывод, что шаг интегрирования выбран не верно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.