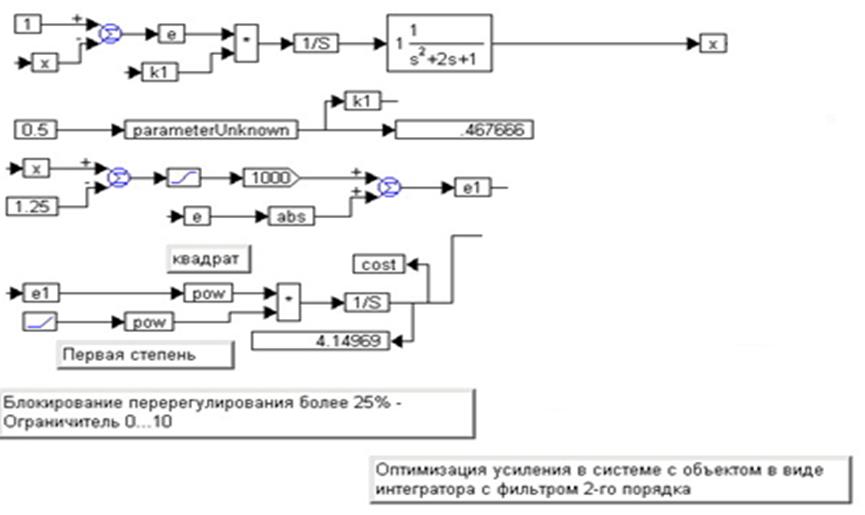
Для ограничения перерегулирования достаточно осуществить такое преобразование ошибки, при котором попадание ее за допустимый интервал дало бы резкое увеличение стоимостного функционала. Пусть тестовый сигнал всегда единичный (V=1), а допустимая величина перерегулирования задана в виде G% (в процентах по отношению к начальной ошибке), то следует установить для выходной величины X(t) верхний предел
Z=1+G/100.
(Например, при G=10% получаем Z=1.2)
Ситуация X(t)>Z должна резко увеличивать стоимостный функционал.
Для этого достаточно из выходной величины вычесть этот уровень, X1(t)=X(t)-Z, результат ограничить снизу нулем, X2(t)=max{0, X1(t)}, после чего умножить на большой коэффициент и прибавить к модулю ошибки управления, входящей в стоимостный функционал:
e1(t)=e(t)+X2(t)
Ошибку e1(t) далее используем вместо e(t)
 25
продолжение
25
продолжение
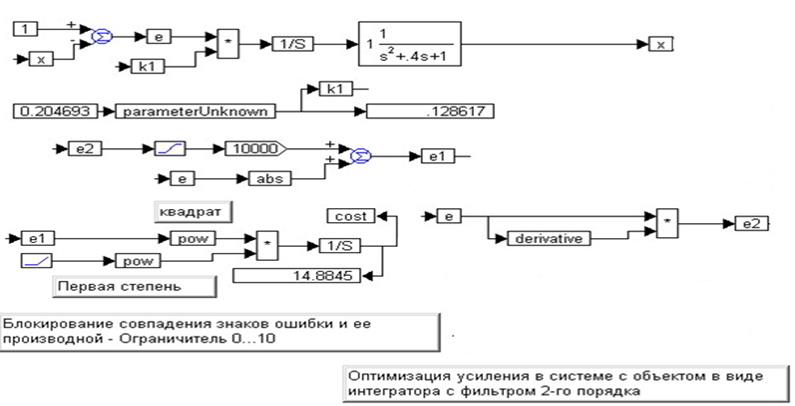
ОГРАНИЧЕНИЕ КОЛЕБАТЕЛЬНОГО ВИДА ПЕРЕХОДНОГО ПРОЦЕССА
В данном случае речь идет о колебании переходного процесса по мере его развития. Признаком таких колебаний служит совпадение знака ошибки и ее производной. Такая ситуация должна быть признана, разумеется, нежелательной. Выявление этой ситуации достигается умножением ошибки на ее производную. Полученный результат должен быть отрицательным. Следует применить ограничитель этой величины снизу, настроенный на ноль, а с выхода ограничителя сигнал умножить на большой коэффициент и результат приплюсовать к модулю ошибки, используемой для вычисления стоимостного функционала.
ПРИМЕНЕНИЕ ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ ДЛЯ СНИЖЕНИЯ ЖЕСТКОСТИ ТРЕБОВАНИЙ КРИТЕРИЯ
Применение зоны нечувствительности позволяет снизить жесткость требований критерия качества. В частности, если в предыдущем случае сигнал, получаемый произведением ошибки на ее производную, пропустить предварительно через зону нечувствительности, то небольшое значение этого произведения не будет влиять на работу программы при оптимизации регулятора. Зона нечувствительности может быть применена не только к результату произведения, но вместо этого – к исходным величинам, то есть к ошибке и к ее производной. В этом случае можно использовать раздельные оценки допустимых значений ошибки, при которой производная ошибки может иметь тот же знак с ней, и допустимого значения производной от ошибки в случае совпадения ее знака со знаком ошибки.
Могут быть применены и все три зоны нечувствительности, если это целесообразно: к каждой величине по отдельности и к их произведению в итоге. Такое ограничение аналогично ограничению допустимых режимов эксплуатации полупроводниковых элементов: как правило, требования устанавливаются в отдельности к максимальному току и к максимальному напряжению на элементе, а также к максимальной рассеивающей мощности, определяющейся произведением этих величин. В нашем случае мы, наоборот, можем установить минимальное значение ошибки и минимальное значение производной ошибки, которое допустимо в любых случаях, а также минимальное значение произведения этих величин, которое также допустимо (при несовпадении произведения минимальной ошибки на минимальную производную ошибки).
Этот прием всегда необходим в реальной системе, а также при наличии шумов, которые также учитываются в модели в процессе оптимизации. Особенно необходимо применение зоны нечувствительности при использовании критерия с высокими показателями степени при t, поскольку в этом случае даже очень маленькая величина ошибки управления, порождаемая шумами, вносит чрезвычайно большой вклад в результат оптимизации, что, разумеется, нежелательно.
Могут быть в зависимости от задачи выдвинуты другие обоснованные критерии оптимальности.
Например, наряду с тем, что задано ограничение по уровню управляющего воздействия (что легко учитывается вводом ограничителя на выходе регулятора) может быть потребована минимизация мощности управляющего сигнала. Это требование должно быть сопряжено с другим требованием к качеству переходного процесса, например, с рассматриваемыми ранее стоимостными критериями. Для совмещения этих требований целесообразно использовать суммирование с весовыми коэффициентами.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.