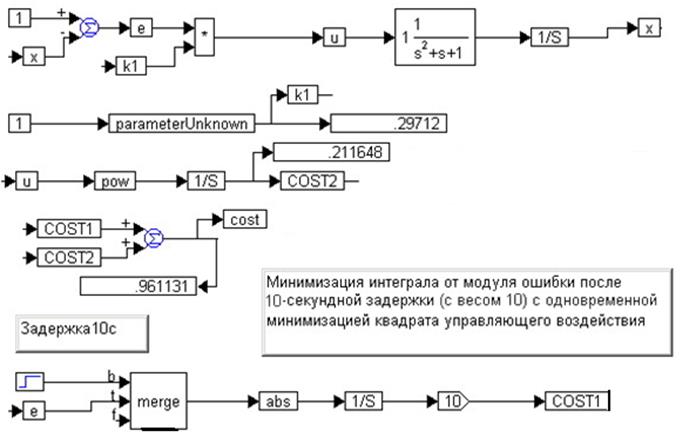
Другими аналогичными требованиями, выдвигаемыми наряду с минимумом энергии управляемого сигнала, могут быть, например, требование минимума интеграла от модуля ошибки, начиная с некоторого момента времени. В этом случае весовой коэффициент также имеет большое значение для увязывания двух этих требований.
Могут быть выдвинуты и такие жесткие требования, которые включаются скачком, и невыполнение которых недопустимо. Примером этого может служить требование вхождения ошибки в заданную погрешность после определенного времени от начала изменения входного ступенчатого сигнала (достижение заданной точности к заданному времени). В этом случае дополнительный член в критерии качества должен включаться скачком, и иметь очень большой весовой коэффициент в сравнении с коэффициентом основного критерия.
26 продолжение

Шаг интегрирования – малый интервал времени, на котором рассчитывается отклик. Он должен быть настолько мал, чтобы, во-1, расчет был элементарно прост, во-2, внесение задержки было пренебрежимо малым и не влияло даже с учетом обратной связи на точность результата.
Если шаг интегрирования больше длительности переходного процесса (т.е. выбран некорректно), то увидим неустойчивый либо существенно колебательный переходный процесс. Если шаг интегрирования меньше длительности переходного процесса (т.е. выбран корректно), то увидим устойчивый переходный процесс, но проявляется некоторая инерционность. Изменение шага интегрирования в небольших пределах не должно менять вида переходного процесса (шкала времени масштабируется, если дана в единицах шага интегрирования, но сохраняется, если дана в единицах времени). Небольшие девиации параметров настройки могут качественно менять переходный процесс, если система находится вблизи границы устойчивости; если же система имеет достаточный запас устойчивости, то небольшие девиации меняют переходные процессы незначительно, количественно, а не качественно.
Испытание моделей должно осуществляться на задачах, решение которых известно и без применения моделей. Решение неизвестных задач должно осуществляться методами моделирования, успешно испытанными ранее. Никогда не должно быть при решении задачи более одной неопределенности: либо неизвестна задача, либо не известен метод. Если метод новый и задача новая, то результаты будут недостоверными. Новый метод проверяется на старых задачах, новые задачи решаются методом, прошедшим успешное испытание.
Контроль ошибок осуществляется на известных примерах:
Проверка моделирования замкнутой системы с П-регулятором
1. Интегратор с любым коэффициентом и ООС всегда устойчив
2. Звено первого порядка с любым коэффициентом и ООС всегда устойчиво
3. Два звена второго порядка с разными постоянными времени при увеличении коэффициента усиления сначала устойчиво, затем – неустойчиво.
4. Установившаяся ошибка обратно пропорциональна общему коэффициенту усиления по контуру: d=1/(1+K)≈1/K.
Возможные причины ошибок модели в САУ
1. Не соответствие вида или параметров математической модели реальному описанию объекта (ошибки структурной или параметрической идентификации).
2. Несоответствие режима идентификации и рабочему режиму при существенной зависимости параметров от режима (недоучет нелинейных свойств САУ).
3. Недоучет свойств некоторых динамических элементов (пренебрежение фильтрующими свойствами, динамической нелинейностью и т.п.).
4. Ошибочное принятие линейной модели при явно проявляющихся нелинейных свойствах (или при проявлении их в определенном режиме)
5. Нестационарность объекта (и не принятие её во внимание)
6. Гистерезисные явления, релаксации между режимами измерений, недоучет шумов и др. мешающие факторы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.