Такие условия называются системой (комплексом) 2х СВ. Таким 2-мерным СВ будет посвящена эта глава.
Пример№1: производится выстрел из оружия, точка попадания снаряда может быть охарактеризована С 2х СВ.
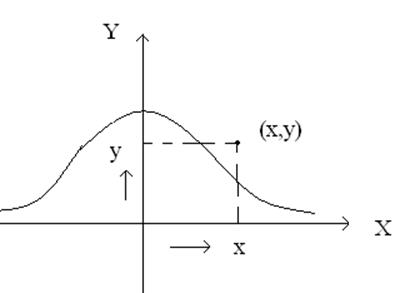
Х – отклонение по дальности;
Y – боковое отклонение (уклонение).
Тогда С 2х СВ (х,у)=р(Х=х, У=у)
Чем вызваны эти отклонения? Ответ на этот вопрос не
более чем кокетство, ибо известно, многочисленными малозаметными причинами это
обусловлено, которые в общем случае подчиняются нормальному ЗР. Что касается
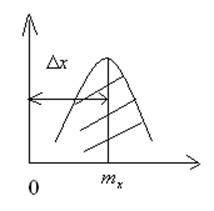
точности наведения на цель, та ошибка может выражаться в виде систематической
ошибки. Эта ошибка ![]() может быть убрана путем
регулирования прицела.
может быть убрана путем
регулирования прицела.
Пример№2
При синусоидальном напряжении в электрических и радиотехнических целях, С 2х СВ определяется СВ Х – фазы включения и У – отклонение амплитуды синусоиды.
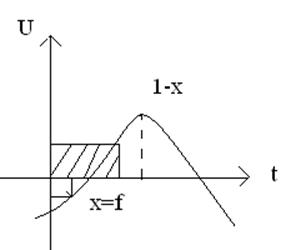
Случайные колебания амплитуды, подчиняющиеся нормальному закону, называются «белым шумом».
Пример№3: потребление электрической нагрузкой активной и реактивной мощности также представляют собой С 2х СВ = (P,Q).
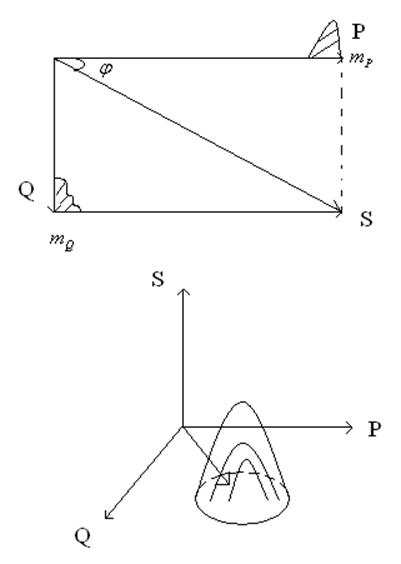
В случае системы декартовых координат система СВ
содержит P и Q, а полярных координат С 2х СВ содержит S – полная
мощность и ![]() - коэффициент мощности.
- коэффициент мощности.
Таким образом, при рассмотрении 2-мерных СВ необходимо рассматривать основные понятия СВ как некоторые системы, что усложняет операции с ними. В ряде случа6ев можно констатировать, что число СВ входящих в систему может быть больше 2х.
Пример№1: результат сдачи сессии можно рассмотреть как систему 3х\4х СВ (Х – ТВ, Y – ТОЭ, Z – философия, F - гидравлика).
Пример№2: предсказание погоды представляет собой систему 4х СВ (X – температура,Y – давление, Z – скорость ветра, F - влажность).
В этом случае имеем дело с многомерными системами СВ, которые рассматривать не будем.
5.2. ЗР С 2х СВ
ЗР 2-мерной СВ называется перечень ее возможных значений и соответствующих им вероятностям, т.е. вероятностей пар чисел.
![]() ,
,
где ![]() =1,2,3…n
=1,2,3…n
X=x1,x2…xn
![]() =1,2,3…m
=1,2,3…m
Y=y1,y2…yn
Иначе говоря, ЗР представляет собой матрицу или таблицу с 2-мя входами в виде СВ X и Y.
|
X Y |
y1 |
y2 |
… |
yj |
… |
ym |
p(x) |
|
x1 |
p(x1 y1) |
p(x1 y2) |
… |
p(x1 yj) |
… |
p(x1 ym) |
p(x1) |
|
x2 |
p(x2 y1) |
p(x2 y2) |
… |
p(x2 yj) |
… |
p(x2 ym) |
p(x2) |
|
… |
… |
… |
… |
… |
… |
… |
… |
|
xj |
p(xi y1) |
p(xi y2) |
… |
p(xi yj) |
… |
p(xi ym) |
p(xi) |
|
… |
… |
… |
… |
… |
… |
… |
… |
|
xn |
p(xn y1) |
p(xn y2) |
… |
p(xn yj) |
… |
p(xn ym) |
p(xn) |
|
p(y) |
p(y1) |
p(y2) |
… |
p(yj) |
… |
p(ym) |
Таким образом, первая строка имеет все возможные значения случайной компоненты Y при постоянном значении СВ Х, ее компоненты x1.
Первый столбец все возможные значения СВ Х при постоянном значении первой компоненты СВ Y.
Т.к. события в компонентной строке и столбце образуют полную группу событий, и эти события несовместны, то можно воспользоваться теоремой сложения.
![]()
Эта вероятность того, что СВ примет значение p(x1). Аналогичным образом можно вычислить вероятность любой другой компоненты, векторов X и Y. Т.к. все события представляют собой полную группу, то правило:
Пример: Найти законы распределения компонент случайного двумерного вектора, заданного следующим ЗР.
XY |
х1 |
х2 |
х3 |
|
y1 |
0,1 |
0,2 |
0,3 |
|
y2 |
0,25 |
0,15 |
0,25 |
Частные ЗР по X и Y, компонентов вектора X Y, находящиеся суммированием соответствующих столбцов и строк.
Так по Х имеем:
Х |
х1 |
х2 |
х3 |
|
р |
0,1 |
0,35 |
0,55 |
![]()
Сумма вероятностей =1, т.к. значения Х представляют собой полную группу несовместных событий.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.