Рис. 14
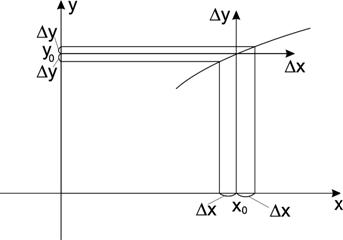
Если принцип малых отклонений (МО) соблюдается для динамических характеристик, то они раскладываются в ряд Мак’Лорена или Тейлора.
![]()
Рассмотрим на примере двигателя постоянного тока с независимым возбуждением.
|
||||||
|
||||||
|
||||||

Рис. 15
Мдин
= Мдв( U, ![]()
![]() )
– Мв (
)
– Мв (![]() ) (1)
) (1)
Основное уравнение движения привода:
Мдин
= ![]() (2)
(2)
Рассмотрим случай, когда ЭМ процессами можно пренебречь.
Рабочая точка ![]() :
:
![]()
![]() (3)
(3)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.