15. а) Рівняння статики та динаміки, лінеаризація.
б) Критерій стійкості Найквиста для випадку нестійкої розімкненої САУ.
16. а) Пряме та зворотне перетворення Лапласа.
б) Стійкість систем, що включають ланку запізнення.
17. а) Прямі показники якості перехідного процесу. (Оцінка якості при дії східчастої функції).
б) Оцінка якості регулювання за дійсною частотною характеристикою замкненої САУ.
18. а) Форми запису лінійних диференціальних рівнянь.
б) Побудова перехідної характеристики методом трапецій.
19. а) Передавальні функції САУ.
б) Пряме та зворотне перетворення Фурьє.
20. а) Частотні характеристики лінійних САУ.
б) Логарифмічні частотні характеристики.
21. а) Оцінка якості регулювання за амплітудно-частотною характеристикою.
б) Що таке типова динамічна ланка? За яким принципом виділяються типові динамічні ланки?
22. а) Запаси стійкості по фазі та амплітуді. Визначення запасів стійкості за логарифмічними частотними характеристиками.
б) Правила перетворення структурних схем САУ.
23. а) Побудова асимптотичної ЛАЧХ САУ.
б)Кореневі методи оцінки якості регулювання.
3.2. Задачі
Практична частина завдання складається із двох задач.
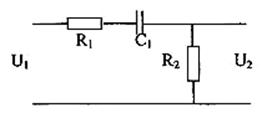
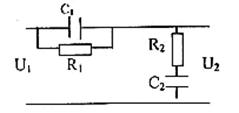
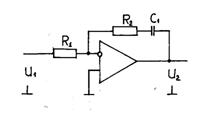
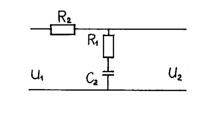
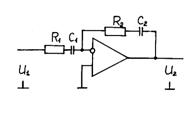
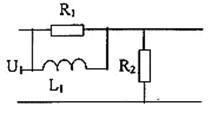
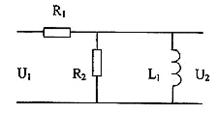
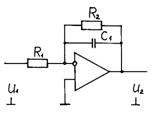
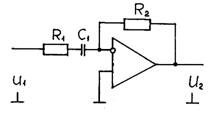
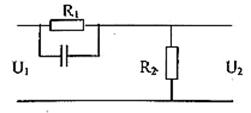
3.2.1. Для лінійного чотириполюсника, схема якого наведена на мал.1 відповідно до свого варіанту, що визначається останньою цифрою шифру, і параметрами схеми, заданими у таблиці 2 (передостання цифра шифру), потрібно визначити передавальну функцію та скласти диференціальне рівняння, що зв'язує вхідну та вихідну напруги чотириполюсника.
|
|
|
|
0 |
1 |
|
|
|
|
2 |
3 |
|
|
|
|
4 |
5 |
|
|
|
|
6 |
7 |
|
|
|
|
8 |
9 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.