Встречно-паралельное соединение.
 |
Рис. 11
![]() Хвых = к1
Хвых = к1 ![]()
![]()
![]() Хос = косХвых
Хос = косХвых
![]()
![]()
|
" – " положительная ОС " + " отрицательная ОС |
Пример использования графического метода для нелинейных систем [ ]. (рис. 12 –отрицательная обратная связь; рис. 13 – положительная обратная связь)
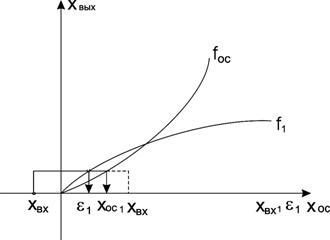
Рис. 12
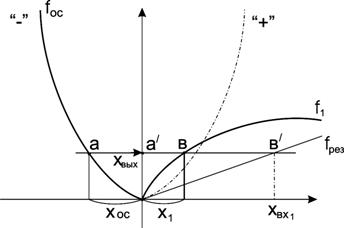
Рис. 13
5. ДИНАМИКА САУ
5.1. Математические модели САУ
Характеристика динамических режимов.
Переходной режим – это переход из одной точки установившегося состояния в другую.
В динамике САУ описывают дифференциальные уравнения. Все САУ нелинейны, т.к. не существует линейных элементов, однако в подавляющем большинстве случаев характеристики элементов достаточно гладкие и могут быть с достаточной степенью точности литаризованы.
5.2. Метод малых отклонений и линериализация дифференциальных уравнений
С достаточной степенью точности в пределах заданной рабочей точки имеющуюся характеристику можно линериазовать, если малому отклонению на входе относительно рабочей точки системы соответствует малое отклонение ее на выходе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.