Рис. 6
Статические звенья обладают однонаправленностью.
4.2. Статические характеристики различного соединения элементов
Три способа соединения
а) последовательное;
б) параллельное;
в) встречно-паралельное (ОС).
Правила свертки
Последовательное соединение. На вход последующего элемента подается сигнал с выхода предыдущего элемента.
 |
Рис. 7
![]() Х1 = к1 Хвх
Х1 = к1 Хвх
Х2 = к2 Х1 Для линейной системы
Хвых = кn Хn-1
![]()
![]()
Для нелинейной системы можно использовать графический метод [ ].
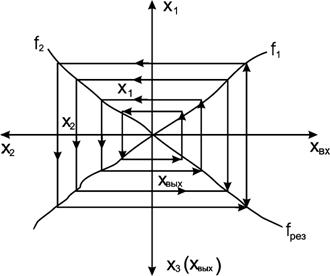
Рис. 8
Параллельное соединение
На вход элементов подается один и тот же сигнал, а выходы с этих звеньев суммируются.
 |
Рис. 9
Х1 = к1 Хвх
Х2 = к2 Хвх
……………
Хвых = Х1 + Х2 + … +Хn
![]()
![]()
Пример использования графического метода для нелинейных систем [ ].
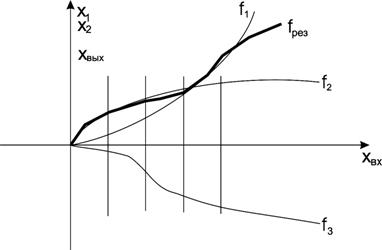
Рис. 10
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.