

где
![]() ,
, ![]() ,
, ![]() ,
, ![]() — теоретические коэффициенты полинома.
— теоретические коэффициенты полинома.
Данные полинома могут быть получены при бесконечном числе опытов и при отсутствии возмущающих воздействий.
В реальном ХТП всегда присутствует возмущающее воздействие, и количество опытов ограничено и называется выборкой. Поэтому полученная модель является оценкой соответствующего теоретического уравнения 2.5.1. и называется уравнением регрессии следующего вида:

где ![]() — приближенное значение;
— приближенное значение;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,![]() — оценки соответствующих теоретических
коэффициентов и называются коэффициентами уравнения регрессии;
— оценки соответствующих теоретических
коэффициентов и называются коэффициентами уравнения регрессии;
![]() — свободный член;
— свободный член;
![]() — линейный эффект (линейное влияние
— линейный эффект (линейное влияние ![]() на
на ![]() );
);
![]() — эффект попарного взаимодействия;
— эффект попарного взаимодействия;
![]() — квадратичный эффект.
— квадратичный эффект.
Данная полиномиальная форма 2.5.2. удобна и эффективна так как:
1) увеличивается точность математического описания ХТП;
2) она позволяет сравнительно просто определить коэффициенты уравнения с помощью ЭВМ.
2.5.2. Модели динамики (статистические) химико-технологического процесса
А) Основные виды возмущающих воздействий и основные виды получаемых моделей.
Для
получения статистической модели динамики химико-технологического процесса (ХТП)
создается испытательное возмущающее воздействие ![]() и измеряется изменение
и измеряется изменение ![]() объекта
объекта ![]() . Полученное выражение
. Полученное выражение ![]() является решением с
является решением с ![]() в правой части с нулевыми начальными
условиями
в правой части с нулевыми начальными
условиями ![]() . То есть подбирается такая
аппроксимирующая функция (то есть решение дифференциального уравнения), которая
совпадает с данной экспериментальной зависимостью
. То есть подбирается такая
аппроксимирующая функция (то есть решение дифференциального уравнения), которая
совпадает с данной экспериментальной зависимостью ![]() . Точность получаемой модели зависит от
точности аппроксимации
. Точность получаемой модели зависит от
точности аппроксимации ![]() решение дифференциального уравнения.
решение дифференциального уравнения.
По
виду испытательных возмущений ![]() различают пассивный и активный
эксперимент. При пассивном в качестве
различают пассивный и активный
эксперимент. При пассивном в качестве ![]() используются случайные функции входной
координаты
используются случайные функции входной
координаты ![]() .
.
Экспериментальный
метод получения модели динамики базируется на предположении сосредоточенности
переменных, на линейности статической характеристики ![]() и стационарности процесса. Это
позволяет описать динамику процесса в виде однородного дифференциального
уравнения.
и стационарности процесса. Это
позволяет описать динамику процесса в виде однородного дифференциального
уравнения.
ХТП
являются процессами с распределенными параметрами. Данные ХТП могут быть
представлены как объекты сосредоточенными параметрами, распределённость может быть
учтена в модели звеном чистого запаздывания. При небольшом изменении входных
переменных ![]() можно принять зависимость линейной. Все
ХТП являются нестационарными, но на интервале изменения
можно принять зависимость линейной. Все
ХТП являются нестационарными, но на интервале изменения![]() данный ХТП является стационарным, так
как динамические свойства меняются медленно.
данный ХТП является стационарным, так
как динамические свойства меняются медленно.
Вывод: с учетом всех допущений динамическую модель ХТП можно представить в виде однородного дифференциального уравнения.
Динамическую модель можно представить в виде:
1) однородными дифференциальными уравнениями

![]()
где
![]() — чистое запаздывание.
— чистое запаздывание.
2) передаточными функциями

3) амплитудно-фазовыми характеристиками

2.5.3. Определение динамических характеристик химико-технологических процессов при активном эксперименте
Основным
методом является метод переходных функций. Переходной функцией ![]() называется
зависимость выходной координаты
называется
зависимость выходной координаты ![]() при изменении входной координаты от
значения
при изменении входной координаты от
значения ![]() до
до ![]() .
.
где
![]() — значение входной координаты в
стационарном режиме.
— значение входной координаты в
стационарном режиме.

Функция ![]() задается в виде графика или таблицы.
Если статическая характеристика объекта линейна, то
задается в виде графика или таблицы.
Если статическая характеристика объекта линейна, то ![]() также являются линейными и их величина
не влияет на динамику объекта, то есть
также являются линейными и их величина
не влияет на динамику объекта, то есть
![]()
Если входная координата -функция:

то
выходная координата 𝛿 имеет вид импульсной функции ![]()
![]()


![]()
Активный эксперимент для получения динамической характеристики
химико-технологического процесса (ХТП) заключается в снятии функции ![]() и аппроксимацией
её решением однородного дифференциального уравнения с постоянными
коэффициентами и нулевыми начальными условиями.
и аппроксимацией
её решением однородного дифференциального уравнения с постоянными
коэффициентами и нулевыми начальными условиями.
Процесс определения динамических характеристик включает:
1) Изучение промышленного объекта моделирования. Для этого изучается технология процесса, КИПиА, исследуется сам процесс ХТП как объект управления и в результате составляется следующая схема:
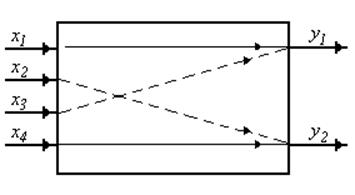
Рис. 6 Схема исследуемого объекта
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.