|
№ |
|
|
|
|
|
|
|
|
1 |
+1 |
-1 |
-1 |
+1 |
1/3 |
1/3 |
|
|
2 |
+1 |
+1 |
-1 |
-1 |
1/3 |
1/3 |
|
|
3 |
+1 |
-1 |
+1 |
-1 |
1/3 |
1/3 |
|
|
4 |
+1 |
+1 |
+1 |
+1 |
1/3 |
1/3 |
|
|
5 |
+1 |
+1 |
0 |
0 |
1/3 |
-2/3 |
|
|
6 |
+1 |
-1 |
0 |
0 |
1/3 |
-2/3 |
|
|
7 |
+1 |
0 |
+1 |
0 |
-2/3 |
1/3 |
|
|
8 |
+1 |
0 |
-1 |
0 |
-2/3 |
1/3 |
|
|
9 |
+1 |
0 |
0 |
0 |
-2/3 |
-2/3 |
По данным Таблицы 2.10 можно получить следующие уравнения регрессии:


В ортогональных планах второго порядка коэффициенты регрессии вида 2.7.53 оцениваются с различной точностью.
Запишем уравнение 2.7.52 для ![]() :
:
![]()
![]()
![]()
![]()
Вычислительный алгоритм для ортогональных планов второго порядка
включает те же планы, что и для первого порядка. Отличие заключается в оценке
значимости коэффициентов уравнения 2.7.53 с учетом различных значений величин ![]() ,
, ![]() ,
, ![]() .
.
Д) Симплекс планирования экспериментов и оптимизация химико-технологических процессов.
Необходимо получить материальную модель некоторого химико-технологического (ХТП) в виде уравнения регрессии:
![]()
Для этой цели имеется симплекс метод.
Под
правильным симплексом понимается совокупность ![]() равноудаленных точек в -мерном
факторном пространстве, то есть исходная серия представляет правильный
симплекс. Каждая точка в пространстве — это условие.
равноудаленных точек в -мерном
факторном пространстве, то есть исходная серия представляет правильный
симплекс. Каждая точка в пространстве — это условие.
Количество
опытов ![]()
В
каждой точке измеряется значение ![]() при определённом значении
при определённом значении ![]() .
.
По
результатам исходной серии опытов определяется точка отбрасывания и при
планировании ![]() опыта определяются координаты
зеркального отображения (по всем осям
опыта определяются координаты
зеркального отображения (по всем осям ![]() ) данной наихудшей точки относительно
центра. Мы получаем новый симплекс, который включает все остальные точки кроме
наихудшей. И опять оцениваем величины
) данной наихудшей точки относительно
центра. Мы получаем новый симплекс, который включает все остальные точки кроме
наихудшей. И опять оцениваем величины ![]() в
новом и находим наихудшую точку, производим её зеркальное отображение, и т.д..
то есть происходит процесс передвижения в область наибольших значений
в
новом и находим наихудшую точку, производим её зеркальное отображение, и т.д..
то есть происходит процесс передвижения в область наибольших значений ![]() .
.
![]() отрезок,
отрезок,
![]() равносторонний треугольник,
равносторонний треугольник,
![]() тетраэдр.
тетраэдр.
Пример: ![]() .
.
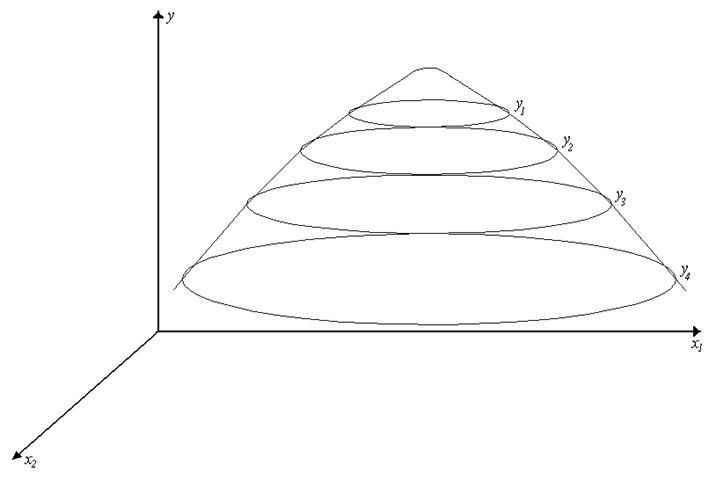
Рис. 15
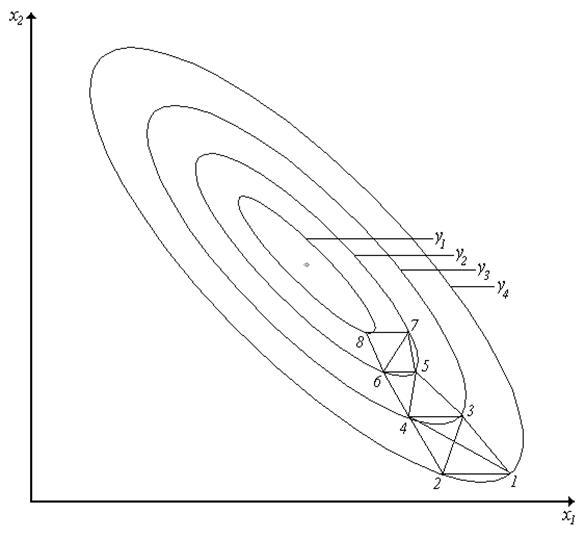
Рис. 16
Рисуем
произвольно треугольник, определяем наихудшую точку относительно ![]() . Наихудшая
точка 1, 2, 3. Отображаем зеркально точу 1 и получаем 4, следовательно,
получаем новый симплекс.
. Наихудшая
точка 1, 2, 3. Отображаем зеркально точу 1 и получаем 4, следовательно,
получаем новый симплекс.
В результате
продвижения мы попадаем в почти стационарную область, то есть область близкую к
![]() .
.
Можно доказать, что если экспериментальные точки в факторном пространстве соответствуют следующей матрице:
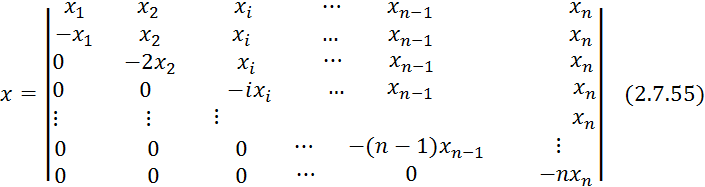
То данные
экспериментальные точки образуют правильный симплекс с центром в начале
координат ![]() и опорной равной 1.
и опорной равной 1.

Рассмотрим свойства матрицы данного плана:
1)
2)
3)
Количество строк ![]() :
:




Так как количество коэффициентов ![]() в уравнении 2.7.57 рано количеству
опытов в симплекс-планировании, то такой план называется насыщенными
в уравнении 2.7.57 рано количеству
опытов в симплекс-планировании, то такой план называется насыщенными

![]() в симплекс-планировании намного выше
чем в ортогональном планировании первого прядка, то есть коэффициенты в
уравнении регрессии в симплекс-планировании оценивается с большой погрешнотью.
в симплекс-планировании намного выше
чем в ортогональном планировании первого прядка, то есть коэффициенты в
уравнении регрессии в симплекс-планировании оценивается с большой погрешнотью.
Для реализации плана 2.7.55 необходимо элементы матрицы представить в численном виде с помощью 2.7.56:
![]()
![]()
![]()
![]()
![]()
![]() =5
=5
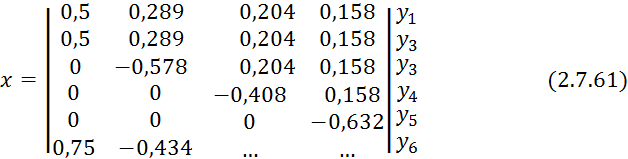

С применением формулы 2.7.61
матрицу 2.7.61 представим в размерных величинах ![]() .
.
Далее
по результатам проведения опытов правильного симплекса определяется наихудшая
точка, то есть точка с наименьшим значением ![]() ,
далее эта точка отбрасывается, и определяются координаты данной наихудшей точки
относительно центра противоположной грани.
,
далее эта точка отбрасывается, и определяются координаты данной наихудшей точки
относительно центра противоположной грани.
Координаты центра противоположной грани по -тому фактору определяются:

где ![]() — координата по -тому фактору наихудшей
точки.
— координата по -тому фактору наихудшей
точки.
Координаты отраженной по![]() -тому
фактору:
-тому
фактору:
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.