регулювання шляхом зміни наповнення робочої порожнини або об’ємне регулювання;
регулювання шляхом зміни форми робочої порожнини або механічне регулювання;
регулювання шляхом зміни густини робочої рідини.
Регулювання ГДТ шляхом зміни наповнення робочої порожнини здій-снюється за допомогою дроселювання рідини на виході із робочої порожнини ГДТ або установки в робочій порожнині ГДТ заслінки, яка переміщується. При цьому із-за складної конфигурації міжлопатевих каналів та внутрішнього тора мають місце значні втрати енергії потоку робочої рідини і зменшення ступеня наповнення робочої порожнини супроводжується зменшенням коефіцієнту корисної дії (ККД) ГДТ. Було установлено, що будь-який режим роботи при об’ємному регулюванні є тим менш економічним, чим більше момент МТ на цьому режимі при данному наповненні відрізняється від моменту МТ при повному наповненні робочої порожнини.

 Характеристики
ГДТ при об’ємному регулюванні наведені на рис.1. Жорсткість характеристик
(dM/dω2) ГДТ залишається для всіх величин наповнення приблизно однаковою. Це
забезпечує можливість стійкого регу-лювання по кутовій швидкості ω2 при
постійному моменті М2 у диапазоні ω2max /ω2min=5…6. Із усіх способів об’ємне
регулювання характеризується най-меншою швидкодією і найгіршими слідкуючими
Характеристики
ГДТ при об’ємному регулюванні наведені на рис.1. Жорсткість характеристик
(dM/dω2) ГДТ залишається для всіх величин наповнення приблизно однаковою. Це
забезпечує можливість стійкого регу-лювання по кутовій швидкості ω2 при
постійному моменті М2 у диапазоні ω2max /ω2min=5…6. Із усіх способів об’ємне
регулювання характеризується най-меншою швидкодією і найгіршими слідкуючими
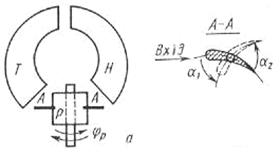
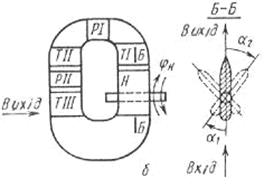
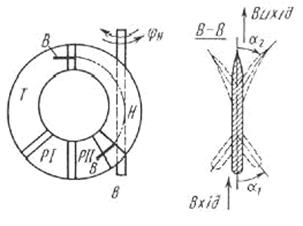
Механічне регулювання є більш економічним і володіє високою мане-вреністю. Найбільш відомими є регульовані ГДТ, в яких змінюються радіуси, кількість і кути лопатей коліс. При цьому найбільш економічним способом механічного регулювання, особливо якщо мова йде про стаціонарні машини, тобто машини, які працюють з нерегульованими по частоті обертання вала двигунами, є регулювання поворотом лопатей коліс. Цей спосіб спочатку був запропонований стосовно до поворотно-лопатевих гідравлічних турбін і добре зарекомендував себе у практиці турбобудування. У порівнянні з приводами постійного струму приводи з таким регулюванням не тільки найбільш дешеві, але, що найголовне, вимагають менших виробничих площ, тому що мають допоміжне обладнання невеликих габаритних розмірів, і їх можна виготовляти будь-якої потужності при будь-який частоті обертання. Наприклад, якщо виконання приводу постійного струму потужністю 5000 кВт з кутовою швид-кістю ω1=156с–1 є серйозною проблемою, то привод, який складається з син-хронного двигуна і регульованого ГДТ великої потужності, можна виготовити порівняно просто.
 На
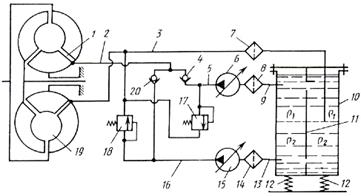
рис.4 показана оригінальна схема пристрою, розроблена в МАДІ, для регулювання
зовнішньої характеристики ГДТ шляхом зміни густини робочої рідини. Пристрій
містить регульований насос 15, який підключено всмок-тувальною 13 і напірною 16
гідролініями відповідно до нижньої частини бака 10 і робочої порожнини 1 ГДТ
19; теплообмінник 7 установлено в зливній гідролінії 3; регульований насос 6 із
всмоктувальною гідролінією 9 підключено до верхньої частини бака 10; вібратор
12 з’єднано з баком, в якому установлена перегородка 11 з отворами, що розділяє
його на дві порожнини, заповнені робочими рідинами з густинами ρ1 і ρ2. У всмоктувальних
гідролініях 13 і 9 установлені фільтри 14 і 8. В гідролінії 16 установлені
запобіжний 18 і зворотний 2 клапани. В напірній гідролінії 5 насоса 6, яка
підключена до гідролінії 2, також установлені запобіжний 17 і зворотний 4
клапани.
На
рис.4 показана оригінальна схема пристрою, розроблена в МАДІ, для регулювання
зовнішньої характеристики ГДТ шляхом зміни густини робочої рідини. Пристрій
містить регульований насос 15, який підключено всмок-тувальною 13 і напірною 16
гідролініями відповідно до нижньої частини бака 10 і робочої порожнини 1 ГДТ
19; теплообмінник 7 установлено в зливній гідролінії 3; регульований насос 6 із
всмоктувальною гідролінією 9 підключено до верхньої частини бака 10; вібратор
12 з’єднано з баком, в якому установлена перегородка 11 з отворами, що розділяє
його на дві порожнини, заповнені робочими рідинами з густинами ρ1 і ρ2. У всмоктувальних
гідролініях 13 і 9 установлені фільтри 14 і 8. В гідролінії 16 установлені
запобіжний 18 і зворотний 2 клапани. В напірній гідролінії 5 насоса 6, яка
підключена до гідролінії 2, також установлені запобіжний 17 і зворотний 4
клапани.
Рис.4. Пристрій для регулювання характеристик ГДТ шляхом зміни густини робочої рідини
70. Реверсувальні і реверсивні ГДТ
Реверсувальний гідродинамічний трансформатор (ГДТ) дозволяє здійснювати реверс вихідної ланки без реверсу вхідної ланки.
Реверсованою називають гідродинамічну передачу (ГДП) призначену для роботи під час прямого і зворотного обертання вхідної ланки.
При розгляді загальних способів реверсування приводів з використанням ГДП можна виділити три характерних випадки: реверсування після ГДП, реверсування до ГДП і реверсування за допомогою ГДП.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.