Лобова сила найчастіше визначається експериментально, під’ємна – за формулою
![]() ,
яка виходить із теореми М.Е. Жуковського. Приведена формула дозволяє отримати
питому під’ємну силу для лопаті одиничної середньої ширини.
,
яка виходить із теореми М.Е. Жуковського. Приведена формула дозволяє отримати
питому під’ємну силу для лопаті одиничної середньої ширини.
Структуру потока рідини у робочій порожнині насоса показано на рис. 5.
27.
28. Нестійка робота насосів
Виконання
умов енергетичного та матеріального балансу (![]() і
і ![]() ), які забеспечують стійку роботу насоса в режимі
робочої точки, не завжди є достатнім для забезпечення стійкої роботи системи
“насос-зовнішня мережа”. Стійкістю називають здатність системи повертатись у
стан рівноваги після зняття збурення. Умови стійкості можна отримати шляхом аналізу
рівняння перехідного процесу, викликаного виведенням системи “насос-мережа” із
стану рівноваги
), які забеспечують стійку роботу насоса в режимі
робочої точки, не завжди є достатнім для забезпечення стійкої роботи системи
“насос-зовнішня мережа”. Стійкістю називають здатність системи повертатись у
стан рівноваги після зняття збурення. Умови стійкості можна отримати шляхом аналізу
рівняння перехідного процесу, викликаного виведенням системи “насос-мережа” із
стану рівноваги
![]() ,
(1)
,
(1)
де А – коефіцієнт, який характеризує акумулюючу здатність системи.
Розв`язавши
рівняння (1) відносно малого відхилення подачі ![]() , отримаємо
, отримаємо
![]()
 ,
(2)
,
(2)
де с – стала інтегрування, а параметр
 .
(3)
.
(3)
Рівновага
буде стійкою, коли при ![]() ,
, ![]() . Оскільки коефіцієнт
. Оскільки коефіцієнт ![]() - величина позитивна, то при
- величина позитивна, то при
![]() й
й ![]() , якщо
, якщо ![]() , то умовою стійкості буде виконання нерівності:
, то умовою стійкості буде виконання нерівності:
 .
(4)
.
(4)
Наприклад,
для відцентрових насосів, якщо максимальний напір досягається при режимі
холостого ходу (Q=0), тобто ![]() , то уся характеристика насоса є областю стійкої
роботи (рис.1). Якщо у мережі немає резервуарів, тобто відсутня акумулююча здатність,
то уся характеристика насоса є областю стійкої роботи за умови перетинання
характеристик насоса і мережі в одній робочій точці.
, то уся характеристика насоса є областю стійкої
роботи (рис.1). Якщо у мережі немає резервуарів, тобто відсутня акумулююча здатність,
то уся характеристика насоса є областю стійкої роботи за умови перетинання
характеристик насоса і мережі в одній робочій точці.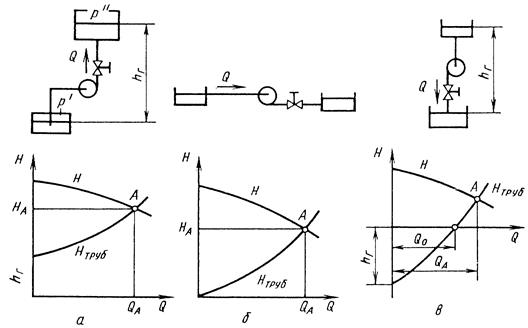
Рис. 1. Визначення режиму
роботи насоса на насосну установку при різних значеннях геометричного напору: а
- ![]() ; б -
; б - ![]() ; в -
; в - ![]()
За
визначених співвідношень енергетичний баланс між насосом і мережею може мати
місце не в одній робочій точці, а в двох (рис.2), до того ж умови роботи у цих
точках будуть різними. Режим роботи в точці А стійкий, тому що тут ![]() . У точці Р режим нестійкий:
збурення у бік збільшення подачі спричинює перехід режиму роботи в точку А;
збурення зворотного знака – перехід
режиму в точку С, а потім знову у точку Р.
. У точці Р режим нестійкий:
збурення у бік збільшення подачі спричинює перехід режиму роботи в точку А;
збурення зворотного знака – перехід
режиму в точку С, а потім знову у точку Р.
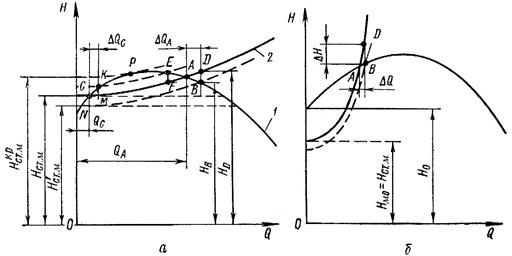 Рис. 2.
Стійка (а) і нестійка (б) робота насосів
Рис. 2.
Стійка (а) і нестійка (б) робота насосів
Працювати
на висхідній гілці характеристики не рекомендується, тому що у цьому випадку
створюються сприятливі умови для нестійкої роботи. Якщо система має
характеристику (рис.2,б), за якою: ![]() , то робота насоса на висхідній гілці кривої
, то робота насоса на висхідній гілці кривої ![]() може бути стійкою (точка А).
може бути стійкою (точка А).
За наявності у мережі акумуляторів енергії (парової подушки у котлі, довгих пружних трубопроводів, резервуара із змінним рівнем) амплітуда коливань при порушенні рівноваги може досягати великих значень і робота насоса біля точки максимуму напорної характеристики (точка Р) може бути нестійкою. Виникає помпаж, тобто явище автоколивань у системі “насос-мережа”. При цьому подача різко змінюється від найбільшого значення до нуля, напір коливається у значних межах, спостерігаються удари, шум та струси насоса й трубопроводів.
Розглянемо
більш детально роботу системи “насос-зовнішня мережа” (рис.2,а). Нехай при
роботі у точці А витрата рідини у системі зростає на ![]() внаслідок короткочасного спаду тиску у напірному
резервуарі, тобто короткочасного зменшення значення статичного напору мережі до
величини
внаслідок короткочасного спаду тиску у напірному
резервуарі, тобто короткочасного зменшення значення статичного напору мережі до
величини ![]() .
.
У
цьому випадку характеристика мережі буде рухатись паралельно собі донизу і
робочою точкою системи стане точка В. Після усунення джерела збурення
характеристика мережі переміститься угору на колишне місце й витраті рідини ![]() буде відповідати напір
буде відповідати напір ![]() мережі, у той час як при
мережі, у той час як при ![]() насос може створити тільки
напір
насос може створити тільки
напір ![]() . Таким чином, при
додатньому значенні
. Таким чином, при
додатньому значенні ![]() виникає
додатна різниця напорів мережі та насоса
виникає
додатна різниця напорів мережі та насоса
![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.