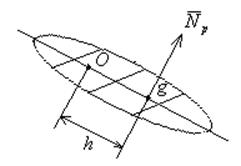
Схема возникновения шарнирного момента.
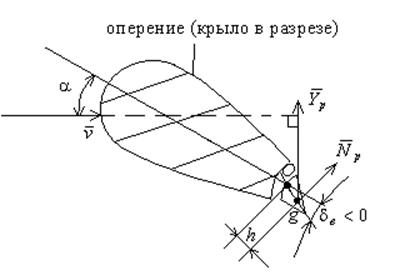
![]() - нормальная к плоскости руля
составляющая аэродинамической силы, действующей на руль (перпендикулярна оси
руля)
- нормальная к плоскости руля
составляющая аэродинамической силы, действующей на руль (перпендикулярна оси
руля)
![]() - расстояние от центра давления
руля до оси его вращения
- расстояние от центра давления
руля до оси его вращения
h>0, если центр давления руля позади оси вращения руля (точки О)
![]() , если отсчитывается против
часовой стрелки
, если отсчитывается против
часовой стрелки
![]() , если направлена вверх
, если направлена вверх
Шарнирный момент – момент силы ![]() ; он стремится уменьшить по модулю угол
; он стремится уменьшить по модулю угол ![]() .
.
![]()
![]() - подъёмная сила руля
(перпендикулярна скорости)
- подъёмная сила руля
(перпендикулярна скорости)
![]()
![]() - угол между хордой и скоростью,
обтекающей оперение
- угол между хордой и скоростью,
обтекающей оперение
![]()
![]() , v
– скорость ц.м.
, v
– скорость ц.м.
Обычно шарнирный момент определяется так:
![]() - средняя аэродинамическая хорда
руля
- средняя аэродинамическая хорда
руля
![]() - площадь поверхности
руля
- площадь поверхности
руля
Подставляя выражение для ![]() ,
получим:
,
получим:
Увеличение размеров ЛА и скорости его полёта
приводит к резкому увеличению шарнирного момента. Так, если при сохранении
условий обтекания размер рулей увеличить в 2 раза, то шарнирный момент
увеличится в 8 раз. Нам не выгодно увеличивать шарнирный момент. Снизить
величину шарнирного момента можно путём уменьшения коэффициента ![]() . Основное средство для достижения этой
цели – применение аэродинамической компенсации руля высоты, так называемая
осевая компенсация. Смысл осевой компенсации – смещение оси вращения ближе к
центру давления, для того чтобы уменьшить плечо силы
. Основное средство для достижения этой
цели – применение аэродинамической компенсации руля высоты, так называемая
осевая компенсация. Смысл осевой компенсации – смещение оси вращения ближе к
центру давления, для того чтобы уменьшить плечо силы ![]() (путём
сдвига оси вращения назад от передней кромки).
(путём
сдвига оси вращения назад от передней кромки).
Органы управления полётом. Управляющие силы и моменты.
На ракету в полёте действуют аэродинамические, реактивные и гравитационные силы. Из этих 3 групп сил для управления ракетой посредством органов управления можно использовать только аэродинамические и газодинамические (реактивные) силы.
Рассмотрим принцип использования аэродинамических сил для управления полётом. Аэродинамические органы управления делятся на рулевые отклоняющие поверхности (рули), поворотные крылья и прерыватели воздушного потока (интерцепторы).
Принцип действия рулей и поворотных крыльев.
Воздушный поток, обтекающий рули, приводит к появлению добавочных осевой и нормальной сил за счёт отклонения рулей от нейтрального положения.
Рассмотрим действие рулей высоты, которые управляют углом тангажа:
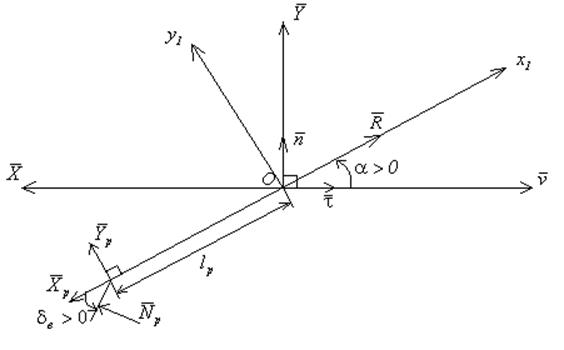
x1 - ось ЛА, точка О – ц.м., ![]() -
вектор скорости ЛА
-
вектор скорости ЛА
![]() , если подъёмная сила направлена
вверх
, если подъёмная сила направлена
вверх
Y - подъёмная сила, R - тяга
Х – сила лобового сопротивления
![]() - орт нормали к траектории ц.м.
- орт нормали к траектории ц.м.
![]() - орт касательной к траектории
ц.м.
- орт касательной к траектории
ц.м.
![]() - осевая и нормальная силы,
действующие на руль
- осевая и нормальная силы,
действующие на руль
![]() ,
, ![]() ,
, 
![]() ,
, ![]() -
аэродинамические коэффициенты
-
аэродинамические коэффициенты
![]()
![]()
Cxp , Cyp - коэффициенты силы лобового сопротивления и подъёмной силы руля
![]() (этот момент заставляет ЛА
поворачиваться на угол атаки
(этот момент заставляет ЛА
поворачиваться на угол атаки ![]() )
)

S – характерная площадь, l – характерная длина
![]()
![]()
Воздушные рули в зависимости от назначения ракеты могут располагаться в различных частях её корпуса. У баллистических ракет воздушные рули располагаются на задних кромках неподвижных стабилизаторов. Ракета имеет 4 руля, оси вращения которых лежат в плоскостях соответствующих стабилизаторов и перпендикулярны оси ракеты.
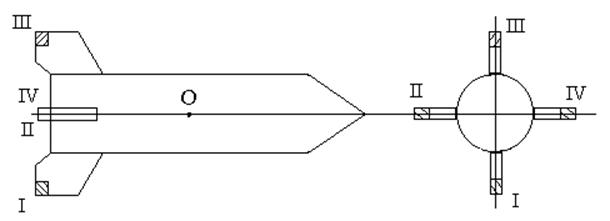
Рули II, IV называются рулями высоты. Они
синхронно связаны друг с другом, т.е. имеют один привод. При их совместном
отклонении от нейтрального положения возникает сила ![]() ,
которая действует в вертикальной плоскости (крен стабилизирован) и управляет
по углу тангажа.
,
которая действует в вертикальной плоскости (крен стабилизирован) и управляет
по углу тангажа.
Рули I, III расположены
в вертикальной плоскости и используются для управления по углу рысканья ![]() и по углу крена
и по углу крена ![]() .
Для управления по углу рысканья рули I, III должны
поворачиваться в одном направлении, создавая потребную боковую управляющую силу
.
Для управления по углу рысканья рули I, III должны
поворачиваться в одном направлении, создавая потребную боковую управляющую силу
![]() . Для парирования крена рули I, III должны поворачиваться в разные стороны, создавая
необходимый крутящий момент
. Для парирования крена рули I, III должны поворачиваться в разные стороны, создавая
необходимый крутящий момент ![]() . Т.к. управления по
углам
. Т.к. управления по
углам ![]() и
и ![]() должно
осуществляться непрерывно и одновременно, то рули I, III
должны поворачиваться независимо друг от друга, для чего, в отличие от рулей
II, IV, они имеют раздельные приводы.
должно
осуществляться непрерывно и одновременно, то рули I, III
должны поворачиваться независимо друг от друга, для чего, в отличие от рулей
II, IV, они имеют раздельные приводы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.