25.02.05
![]()
![]() зависят от числа
Маха (М);
зависят от числа
Маха (М);
![]() - число
Рейнольца (им можно пренебречь);
- число
Рейнольца (им можно пренебречь);
М=![]()
![]() - угол отклонения рулей
направления;
- угол отклонения рулей
направления;
![]() - угол отклонения рулей высоты;
- угол отклонения рулей высоты;
![]() - угол отклонения элеронов;
- угол отклонения элеронов;
Коэффициенты ![]() определяются
экспериментально или путём математического моделирования процесса обтекания ЛА.
Существуют также приближённые формулы.
определяются
экспериментально или путём математического моделирования процесса обтекания ЛА.
Существуют также приближённые формулы.
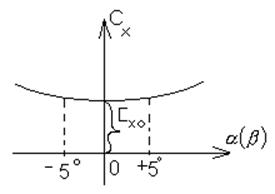
![]() - значения
соответствующих коэффициентов при нулевых угловых параметрах, при этом
коэффициенты
- значения
соответствующих коэффициентов при нулевых угловых параметрах, при этом
коэффициенты ![]() и
и ![]() будут иметь место в том случае,
если ЛА аэродинамически несимметричен. Для аэродинамически симметричного
аппарата
будут иметь место в том случае,
если ЛА аэродинамически несимметричен. Для аэродинамически симметричного
аппарата ![]() и
и ![]() равны нулю.
равны нулю.
Можно изобразить следующие графики зависимости ![]() :
:
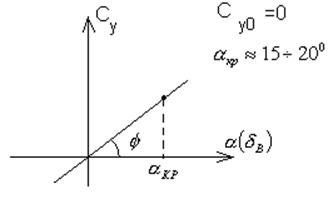
tg![]() - угловой коэффициент
- угловой коэффициент
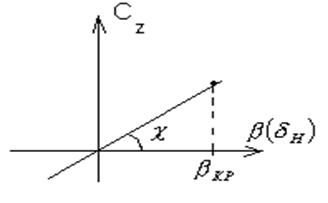
Подъёмная сила от ![]() зависит значительно меньше, чем
от
зависит значительно меньше, чем
от ![]() , кроме случая ЛА с поворотным крылом.
, кроме случая ЛА с поворотным крылом.
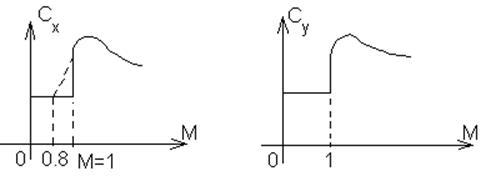
В интервале трансзвуковых скоростей М(0,8-1,2).
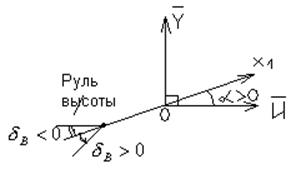
Правило знаков:
Угол атаки ![]() >0, если У направлено
вверх. Угол отклонения руля
>0, если У направлено
вверх. Угол отклонения руля ![]() >0, если отсчёт
производится от нейтрального положения против часовой стрелки.
>0, если отсчёт
производится от нейтрального положения против часовой стрелки.
Используя рис.4, запишем выражение для проекции суммарной аэродинамической силы на оси полускоростной и связанной системы координат.
Проекции на полускоростные оси:
Т.к. ![]() - значит они малые первого порядка.
- значит они малые первого порядка.
![]() мало только тогда,
когда крен стабилизирован. Следовательно
мало только тогда,
когда крен стабилизирован. Следовательно ![]()
Т.к. ![]() - малая величина, то,
- малая величина, то, ![]() следовательно
следовательно ![]()
Проекции на связанные оси:
Учитывая малость углов ![]() можно
считать, что
можно
считать, что![]() , следовательно, можно записать:
, следовательно, можно записать:
Запишем уравнение поступательного движения ЛА в пространстве в проекциях на полускоростные и связанные оси, учитывая, левые и правые части.
Рассмотрим сначала полускоростную систему координат ![]() .
.
Учитывая малость углов ![]() ,
, ![]() :
:
![]()
Рассмотрим связанную систему координат ![]() .
.
Учитывая малость углов ![]() ,
запишем:
,
запишем:
![]()
![]()
Понятие о маневренности. Выражения для перегрузок.
Маневренность - это способность управляемого ЛА совершать полёт по криволинейной траектории.
При полёте по криволинейной траектории изменяется угол
возвышения ![]() (t) и угол курса
(t) и угол курса ![]() (t) . Эти углы
показаны на рис.2.
(t) . Эти углы
показаны на рис.2.
Из рис.2 видно, что угол возвышения - это угол между вектором скорости и горизонтальной плоскостью.
Угол курса ![]() - это
угол между проекцией скорости центра масс на горизонтальную плоскость и
плоскостью стрельбы
- это
угол между проекцией скорости центра масс на горизонтальную плоскость и
плоскостью стрельбы ![]() .
.
Вектором перегрузки ![]() называется
отношение вектора ускорения центра масс к ускорению свободного падения, т.е.
называется
отношение вектора ускорения центра масс к ускорению свободного падения, т.е. 
![]() -
ускорение центра масс.
-
ускорение центра масс.
Вектор перегрузки можно представить в проекциях на любые оси координат. Чаще всего используются полускоростные оси.
![]() - направление касательной к
траектории;
- направление касательной к
траектории;
![]() - направление нормали к
траектории;
- направление нормали к
траектории;
![]() - на бинормаль;
- на бинормаль;
![]()
![]() - нормальная перегрузка.
- нормальная перегрузка.
Запишем выражение для нормальной и касательной перегрузки.
![]() - радиус криволинейной траектории;
- радиус криволинейной траектории;
Проекции на связанные оси:
Располагаемая перегрузка - это та часть перегрузки, которую мы можем изменять при управлении.
Запишем формулу для располагаемой нормальной перегрузки:
 ;
;
Т.к. У= , то
, то 
![]() с подъёмом на высоту уменьшается
по экспоненте, а массовая плотность воздуха у земли
с подъёмом на высоту уменьшается
по экспоненте, а массовая плотность воздуха у земли ![]() , где
, где 
Рули нужны для того, чтобы управлять вращательным движением ЛА.
1.03.05
Уравнение вращательного движения в пространстве.
Выводится с использованием закона моментов количества движения. Закон в векторном виде запишется так:
 - закон моментов количества движения (1)
- закон моментов количества движения (1)
![]() - момент количества движения
относительно центра масс (кинетический момент).
- момент количества движения
относительно центра масс (кинетический момент).
Оно будет иметь смысл, если точка О - неподвижная точка в инерциальном пространстве.
Векторное уравнение (1) будем записывать в проекциях на связанную систему координат. Эта система координат используется преимущественным образом при проектировании уравнения (1). Но на ряду со связанной системой координат, в случае осесимметричного ЛА, может использоваться полусвязанная система координат.
![]() - связанная система
координат;
- связанная система
координат;
![]() - ось симметрии;
- ось симметрии; 
![]() - полусвязанная система
координат;
- полусвязанная система
координат;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.