Угол атаки – угол между проекцией скорости ц.м. на плоскость симметрии (линии М3) и осью ЛА.
При нормальном (правильном) полёте
ЛА углы ![]() и
и ![]() являются
малыми углами <15o
являются
малыми углами <15o
(15o – критичный угол атаки).
Таблица 3.
|
х1 |
y1 |
z1 |
|
|
x |
с11 |
с12 |
с13 |
|
y |
с21 |
с22 |
с23 |
|
z |
с31 |
с32 |
с33 |
Матрица С тоже является
ортогональной, следовательно ![]() ;
; ![]()

Аналогично можно записать линейные преобразования в матричном виде:
 ;
;
Формулы направляющих косинусов:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ,
, ![]() ,
,
![]()
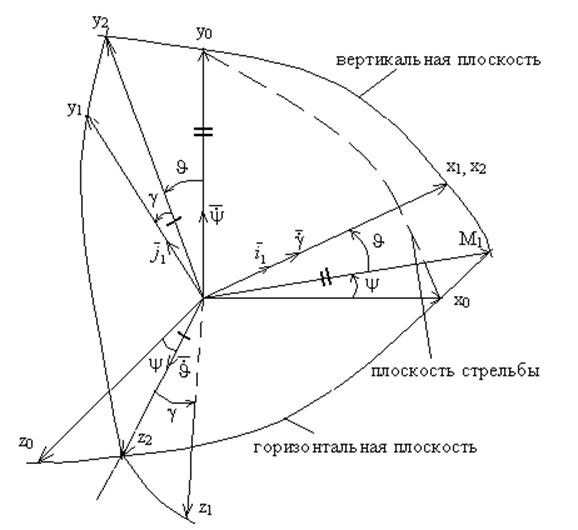
Геометрические соотношения.
Устанавливают связь между углами, ориентирующими ЛА в различных системах координат:
![]()
Для решения поставленной задачи используем таблицы направляющих косинусов 1, 2 и 3 и соответствующие этим таблицам матрицы.
Таблица 1 Таблица 2 Таблица 3
 (*)
(*)
А(![]() ),
), ![]() ,
, ![]()
Поэтому, установив связь между матрицами, можно установить связь между углами. Задача сводится к нахождению связи между матрицами F(A,B,C)=0.
Из (*):

Обращаемся к матрице В
и смотрим в какой элемент матрицы В наиболее простым образом входит
угол ![]() :
:
![]()
(2 строку матрицы А
умножаем на 1 столбец матрицы ![]() ,
подставляем значения из таблиц 1, 2 и 3)
,
подставляем значения из таблиц 1, 2 и 3)
![]() - малы (крен стабилизирован),
тогда
- малы (крен стабилизирован),
тогда
![]()
![]()
15.02.05 *
3 строку матрицы А умножаем
на 1 столбец матрицы ![]() :
:

![]() - малы
- малы
![]()
![]()
![]()
![]()
![]()
![]() - малы
- малы
Определяем ![]() :
:

![]() - малы (
- малы (![]() мал,
т.к. крен стабилизирован)
мал,
т.к. крен стабилизирован)
![]()
В случае горизонтального полёта ЛА на постоянной высоте ![]()
![]()
Во внешней баллистике, механике полёта и теории
гироскопа встречаются другие углы Резаля: ![]() - угол
прецессии,
- угол
прецессии, ![]() - угол нутации,
- угол нутации, ![]() -
угол ротации.
-
угол ротации.
Во внешней баллистике используются углы
Де-Спарра: ![]()
Ориентируют по разному полускоростную и связанную с.к.
![]() -
полускоростная с.к.
-
полускоростная с.к.
![]() -
связанная с.к.
-
связанная с.к.
Кинематические соотношения.
Кинематические соотношения служат для определения линейных
или угловых координат ЛА в зависимости от линейных или угловых скоростей. При
изучении движения ракеты вблизи поверхности Земли со скоростями, меньшими
первой космической, можно не учитывать орбитальное движение Земли и её
вращательное движение, а поверхность Земли считать плоской. В этом случае
стартовую с.к. ![]() , где
, где ![]() - точка
старта, можно считать инерциальной, т.е. абсолютно неподвижной. При этих
условиях выведем основные кинематические соотношения:
- точка
старта, можно считать инерциальной, т.е. абсолютно неподвижной. При этих
условиях выведем основные кинематические соотношения:
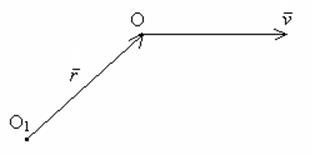
 (т.к.
точка О1 неподвижна) (1)
(т.к.
точка О1 неподвижна) (1)
![]()
![]() -
координаты ц.м. в стартовой с.к.
-
координаты ц.м. в стартовой с.к.
![]() -
абсолютная скорость (скорость относительно инерциальной с.к.), путевая скорость
-
абсолютная скорость (скорость относительно инерциальной с.к.), путевая скорость
![]() - орты
соответствующих осей стартовой с.к.
- орты
соответствующих осей стартовой с.к.
![]()
Подставляем в уравнение (1):

 (2)
(2)
(2) – служат для определения ц.м.
Запишем выражения для проекций скорости ц.м.на координатные оси стартовой с.к. Для этого обратимся к рисунку 2 и таблице 2:
![]()
Для определения углов поворота ![]() нужно вывести ещё 3 уравнения.
Для их вывода обратимся к рисунку 1:
нужно вывести ещё 3 уравнения.
Для их вывода обратимся к рисунку 1:
Кроме того воспользуемся соотношением (3):
![]() (3)
(3)
Спроектируем равенство (3) на оси x1, y1, z1:
 (4)
(4)
Из (4) найдём ![]() :
:
Домножим второе уравнение на ![]() , третье – на
, третье – на ![]() , затем
их сложим:
, затем
их сложим:
![]()
Домножим второе уравнение на ![]() , третье – на
, третье – на ![]() и
вычтем:
и
вычтем:
Из первого уравнения системы (4):
![]()
Упростим (![]() - малы):
- малы):
![]()
Уравнения динамики.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.