Т.к. площадь крыльев ![]() , то
необходимое значение управляющей силы Yкр может быть создано
при малых по сравнению с рулями углах поворота. Однако, здесь необходимо иметь
мощный привод для преодоления шарнирного момента.
, то
необходимое значение управляющей силы Yкр может быть создано
при малых по сравнению с рулями углах поворота. Однако, здесь необходимо иметь
мощный привод для преодоления шарнирного момента.
Такая аэродинамическая схема используется у крылатых ракет, предназначенных для быстрого маневрирования на траектории.
У ПТУРСов (противотанковых уравляемых реактивных снарядов), для которых нужно обеспечить минимальный вес на управление, используется управление с помощью прерывателей воздушного потока или интерцепторов.
Интерцептор – тонкая пластина, расположенная в середине или на задней кромке крыла перпендикулярно его поверхности. Интерцепторы приводятся в колебательное движение с постоянной амплитудой и частотой, при этом, если центр колебаний смещается от оси симметрии крыла, то возникает управляющая сила, т.к. колеблющийся интерцептор большее время будет выдвигаться над поверхностью крыла, к которой сдвинут его центр колебаний. Происходит перераспределение давлений воздуха по крылу и появляется соответствующая управляющая сила.
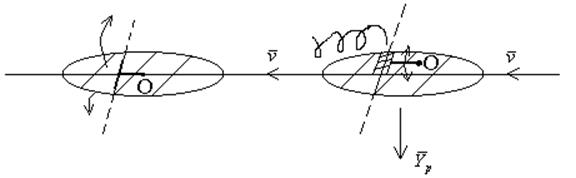
Точка О – центр колебаний
Интерцепторное управление характеризуется малым
весом органов управления и привода, но создаваемые им управляющие силы малы и не
могут обеспечить резкого манёвра на траектории. В некоторых ракетах, например
«Сайдуиндер» (США), используются специальные аэродинамические органы
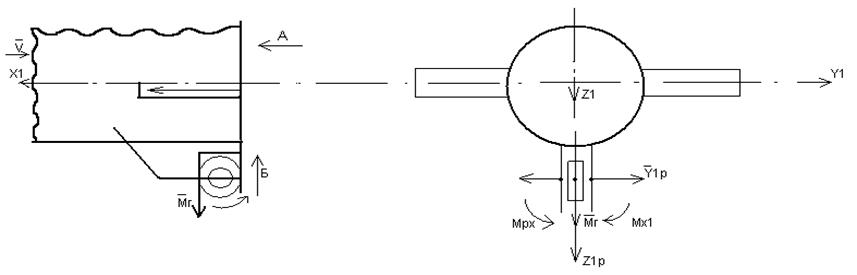
управления, называемые роллеронами (это элероны, внутри которых расположен
массивный диск, вращающийся с большой угловой скоростью и имеющий свойства
гироскопа. Ось вращения диска Оу1р перпендикулярна плоскости
эйлерона, которая в свою очередь может свободно вращаться вокруг оси z1p, расположенной
в плоскости оперения). Перед пуском ракеты диск раскручивается до угловой
скорости ![]() , которая во время полёта поддерживается
воздействием набегающего потока воздуха, обтекающего зубцы диска, выступающие
за боковую кромку элерона. Если возникнет возмущающий момент
, которая во время полёта поддерживается
воздействием набегающего потока воздуха, обтекающего зубцы диска, выступающие
за боковую кромку элерона. Если возникнет возмущающий момент ![]() и ракета вместе с роллеронами под
действием этого момента начнёт вращаться с угловой скоротью
и ракета вместе с роллеронами под
действием этого момента начнёт вращаться с угловой скоротью ![]() , то появится гироскопический момент
, то появится гироскопический момент ![]() , направленный по оси z1p. Под действием этого момента роллерон повернётся
вокруг оси z1p на угол
, направленный по оси z1p. Под действием этого момента роллерон повернётся
вокруг оси z1p на угол ![]() , причём направление поворота будет таким,
чтобы вектор угловой скорости
, причём направление поворота будет таким,
чтобы вектор угловой скорости ![]() стремился по
кратчайшему пути совместиться с
стремился по
кратчайшему пути совместиться с ![]() (правило
Жуковского-Грюэ). Расположенный в симметричном стабилизаторе второй роллерон,
диск которого закручивается в противоположном первому направлении, в свою
очередь отклоняется от нейтральной оси на угол
(правило
Жуковского-Грюэ). Расположенный в симметричном стабилизаторе второй роллерон,
диск которого закручивается в противоположном первому направлении, в свою
очередь отклоняется от нейтральной оси на угол ![]() . В
результате на каждом из роллеронов возникнут управляющие силы
. В
результате на каждом из роллеронов возникнут управляющие силы ![]() , которые создадут момент
, которые создадут момент ![]() , парирующий момент крена
, парирующий момент крена ![]() .
.
Роллерон – это пассивный стабилизатор, который используется для стабилизации крена, но не может управлять движением по крену.
18.03.05
Вид А
__
Ωх1
Ωy1р
![]()
Вид Б Мг
перпендикулярно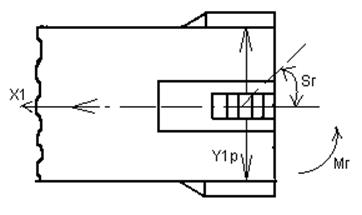 плоскости х1y1,
т.е. по оси z1р
плоскости х1y1,
т.е. по оси z1р
__ направлено
Ωy1р z1р – ось вращения элерона
__
Ωх1
Все аэродинамические органы управления обладают общим недостатком, они могут действовать только в плотных слоях атмосферы (эффективно действовать), поэтому они применяются у ракет с малыми высотами полетами, т.е. для самолетов-снарядов, ЗУР, ПТУРС, авиационных ракет и тактических полевых ракет. Для БР, а также для дополнения аэродинамических органов управления у ракет, перечисленных выше типов, необходимо применять газодинамические управляющие органы. Они являются универсальными, т.к. создают управляющие силы за счет энергии топлива, находящегося в ракете и безразличны к внешним условиям. Эти газодинамические органы следующие:
1) ![]() Газовые рули;
Газовые рули;
2) Дефлекторы; I тип
3) Сопловые насадки;
4) ![]() Поворотные двигатели; II
Поворотные двигатели; II
5) ![]() Поворотные сопла; тип
Поворотные сопла; тип
6) Впрыск реагентов в сверхзвуковую часть сопла; III
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.