Угловая ориентация связанной и стартовой с.к. при совмещённых началах определяется 3 углами (Эйлеровыми углами):
![]() - угол
тангажа
- угол
тангажа
![]() - угол
рысканья
- угол
рысканья
![]() - угол
крена
- угол
крена
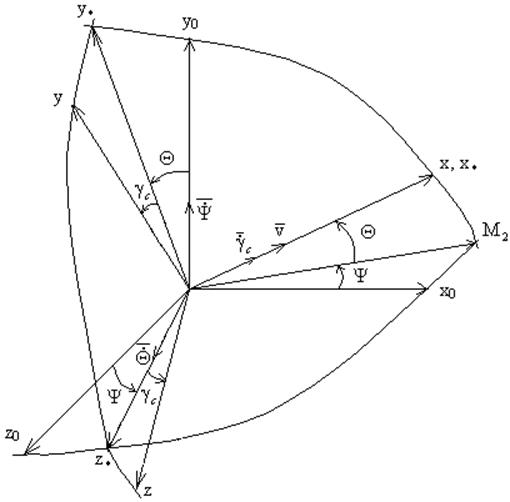
Связанную и стартовую с.к. можно совместить при помощи 3 поворотов.
Рисунок 1.
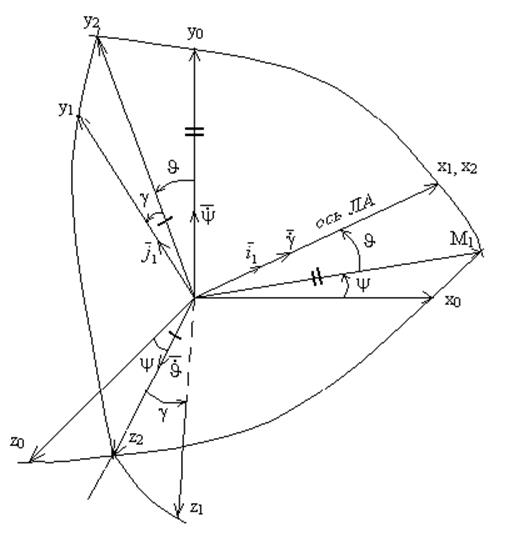
Первый поворот производиться относительно любой оси исходной с.к.
Будем производить первый поворот
относительно y0 на угол ![]() с угловой скоростью
с угловой скоростью ![]() .
.
Второй поворот производится относительно любой из двух осей, вновь образовавшихся в результате первого поворота.
Будем производить поворот
относительно оси z2 на угол ![]() с угловой скоростью
с угловой скоростью ![]() .
.
Третий поворот -
относительно оси, занявшей окончательное положение (относительно х1
на угол ![]() ).
).


![]()
Т.к. связанная с.к. со стартовой совмещается с помощью трёх поворотов, а ЛА неизменно связан со связанной с.к., то абсолютная угловая скорость вращения ЛА:
![]() (1)
(1)
Одновременно ![]() - угловая скорость вращения связанной с.к.
- угловая скорость вращения связанной с.к.
Таблица 1 направляющих косинусов.
|
х1 |
y1 |
z1 |
|
|
x0 |
a11 |
a12 |
a13 |
|
y0 |
a21 |
a22 |
a23 |
|
z0 |
a31 |
a32 |
a33 |
A –
ортогональная квадратная матрица, А(![]() )
)
11.02.05 *
![]() (ортогональная
матрица)
(ортогональная
матрица)
![]()
Направляющие косинусы – косинусы между двумя соответствующими направлениями.
Имея таблицу направляющих косинусов, можно записать линейные преобразования в другие при совмещённых началах, а именно:
x0=а11x1+a12y1+a13z1
y0=a21x1+a22y1+a23z1
z0=a31x1+a32y1+a33z1
Число столбцов в первой матрице равно числу строк второй матрицы.
Определение направляющих косинусов (общее правило).
Чтобы найти направляющий косинус между двумя данными направлениями, нужно единичный вектор (орт) одного направления спроектировать на другое. Если угол между двумя данными направлениями не обозначен, то предварительно орт исходного направления раскладывается на компоненты по двум взаимно перпендикулярным направлениям, и каждая компонента затем проектируется на второе направление (если и её нельзя спроектировать, то и её раскладывают на компоненты и т.д.).
Найдём направляющие косинусы (проиллюстрируем правило):
![]()
![]()
Остальные вывести самостоятельно!
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Правило проверки: направляющие косинусы удовлетворяют условиям совместимости и ортогональности. Условие совместимости означает, что сумма квадратов косинусов строки (столбца) равна единице.
Например:
Условие ортогональности означает, что сумма попарных произведений одной строки (столбца) на элементы другой строки (столбца) равна нулю.
Например:
2. Взаимное расположение стартовой, скоростной и полускоростной с.к. при совмещённых началах.
Расположение скоростной и стартовой с.к. при совмещённых началах определяется 3 углами:
![]() - угол
возвышения (угол наклона траектории),
- угол
возвышения (угол наклона траектории), ![]() - угол
курса
- угол
курса
![]() -
скоростной угол крена
-
скоростной угол крена
Скоростную с.к. можно совместить со стартовой с помощью 3 поворотов
( как в случае рисунка 1).
Рисунок 2.
Порядок поворотов: ![]()
![]()
![]() -
угловая скорость скоростной с.к.
-
угловая скорость скоростной с.к.
![]()
![]() -
угловая скорость полускоростной с.к.
-
угловая скорость полускоростной с.к.
Таблица 2.
|
х |
y |
z |
|
|
x0 |
b11 |
b12 |
b13 |
|
y0 |
b21 |
b22 |
b23 |
|
z0 |
b31 |
b32 |
b33 |
![]() ,
, ![]() и т.д.
и т.д.
Матрица B тоже
является ортогональной, следовательно ![]() ;
; ![]()
Аналогично можно записать линейные преобразования в матричном виде:
 ;
;
3. Взаимное расположение связанной и скоростной с.к.
Определяется 2 углами:
![]() - угол
атаки,
- угол
атаки, ![]() - угол скольжения
- угол скольжения
Следовательно эти системы можно совместить с помощью 2 поворотов.
Рисунок 3.
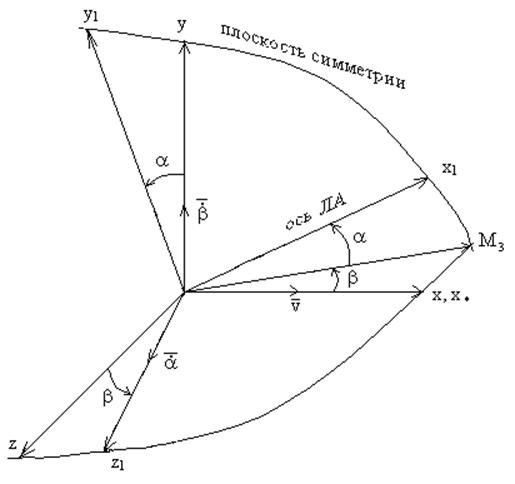
Угол скольжения – угол между
вектором скорости ![]() и плоскостью симметрии.
и плоскостью симметрии.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.