Для упрощения анализа процессов стабилизации
углового положения, часто схематизируют продольное возмущённое движение ЛА,
рассматривая только первый этап этого движения, на котором можно пренебречь
вариацией скорости, т.е. считать ![]() , кроме того, можно не
учитывать влияния силы тяжести и аэродинамического момента от запаздывания
скоса потока. В уравнениях (IV’) это соответствует
тому, что
, кроме того, можно не
учитывать влияния силы тяжести и аэродинамического момента от запаздывания
скоса потока. В уравнениях (IV’) это соответствует
тому, что ![]() и
и ![]() . Кроме
того, будем считать, что подъёмная сила в основном определяется углом атаки
. Кроме
того, будем считать, что подъёмная сила в основном определяется углом атаки ![]() и слабо зависит от угла поворота руля
высоты, то есть будем принимать, что
и слабо зависит от угла поворота руля
высоты, то есть будем принимать, что ![]() (случай ЛА типа
«поворотное крыло» не рассматривается). Таким образом, при анализе процессов
стабилизации будем использовать «усечённую» систему уравнений следующего вида:
(случай ЛА типа
«поворотное крыло» не рассматривается). Таким образом, при анализе процессов
стабилизации будем использовать «усечённую» систему уравнений следующего вида:
 (1)
(1)
Динамические коэффициенты, входящие в эту систему
![]() , принимаем постоянными, считая, что
невозмущённое движение представляет из себя балансировочный режим. Найдём,
используя систему (1), передаточные функции ЛА для параметров
, принимаем постоянными, считая, что
невозмущённое движение представляет из себя балансировочный режим. Найдём,
используя систему (1), передаточные функции ЛА для параметров ![]() по отношению к
по отношению к ![]() .
.
Передаточные функции ЛА для продольного возмущённого движения.
Будем использовать систему (1) предыдущего
параграфа. Предварительно примем, что ![]() .
Запишем эту систему в преобразованном по Лапласу виде при нулевых начальных
условиях.
.
Запишем эту систему в преобразованном по Лапласу виде при нулевых начальных
условиях.
Р - аргумент преобразования Лапласа.
и так далее.
Изображение Лапласа n - ой производной при нулевых начальных условиях:
![]() .
.
Запишем, используя это, систему (1) в преобразованном по Лапласу виде. Применим, оператор Лапласа к левой и правой части. Используется теорема линейности:
 (2)
(2)
Система уравнений, где ![]() -
эквивалентное вариации угла отклонения руля, учитывающее действующий
возмущающий момент
-
эквивалентное вариации угла отклонения руля, учитывающее действующий
возмущающий момент  .
.
Система (2) является линейной алгебраической системой относительно изображений по Лапласу. Таким образом, применив преобразование Лапласа к системе (1), мы вместо линейной системы дифференциальных уравнений получили линейную алгебраическую систему относительно изображений по Лапласу исходных переменных.
Решим эту систему и найдём искомые переменные в
зависимости от ![]() и определим соответствующие
передаточные функции. По определению передаточных функций, как известно,
передаточная функция от
и определим соответствующие
передаточные функции. По определению передаточных функций, как известно,
передаточная функция от 
В дальнейшем изложении упустим для сокращения
записи индекс «![]() » и не будем делать различий
между
» и не будем делать различий
между ![]() и
и ![]() .
Систему (2) будем решать по правилу Крамера. Используя правило Крамера:
.
Систему (2) будем решать по правилу Крамера. Используя правило Крамера:
 , где
, где ![]() (р) - главный определитель системы из
коэффициентов при переменных, стоящих в левой части.
(р) - главный определитель системы из
коэффициентов при переменных, стоящих в левой части.
![]()
![]()
![]()
![]() (р)=
(р)= ;
;
Раскрывая этот определитель, получаем:
![]() , где
, где ![]() .
.
Остальные определители получаются следующим образом:
![]() (р)=
(р)=
![]() (р)=
(р)=
![]() (р)=
(р)=
Теперь можем найти искомые передаточные функции, они запишутся следующим образом:

Перепишем полученное выражение, вводя передаточные функции типовых звеньев. Введём обозначения:
 - коэффициент
усиления ЛА (снаряда);
- коэффициент
усиления ЛА (снаряда);
 - скоростная
постоянная времени;
- скоростная
постоянная времени;
 - постоянная времени
ЛА;
- постоянная времени
ЛА;
 - коэффициент
демпфирования;
- коэффициент
демпфирования;
Тогда, после несложных преобразований, получим следующие выражения для ПФ:

Например, рассмотрим, как выводится одна из найденных передаточных функций:


Таким образом, мы можем записать:

На основании полученных передаточных функций, можно получить и другие передаточные функции, например:
Динамику ЛА можно заменить при воздействии ![]() и входа
и входа![]() , вот
таким звеном:
, вот
таким звеном:
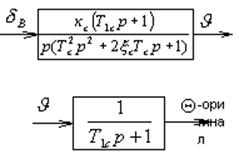
ПФ - это оператор.
Зная передаточную функцию, можно восстановить дифференциальное уравнение, связывающее переменные: вход и выход звена.
(![]() )
)![]() =
=![]()

Таким образом, на основании передаточных функций, можно восстановить дифференциальные уравнения, связывающие вход и выход. Аналогично и для других передаточных функций.
17.05.05 *
Физический смысл коэффициентов, входящих в состав передаточной функции.
Пусть ![]() .
.
Преобразование Лапласа:
Установим физический смысл ![]() . Для
этого воспользуемся передаточной функцией:
. Для
этого воспользуемся передаточной функцией:

Для сокращения записи обозначим:
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.