Рассмотрим кратко наиболее типичную из них. В такой схеме
модуль
![]() требуемого ускорения создается одним двигателем,
жестко
требуемого ускорения создается одним двигателем,
жестко
связанным с летательным аппаратом и называемым главным или маршевым
двигателем.
Придание вектору ![]() требуемого направления осуществляется путем
соответствующей ориентации корпуса аппарата. При управлении баллистическими
ракетами дальнего действия и ракетами-носителями космических аппаратов
маршевый двигатель обычно работает в течение нескольких минут непрерывно, а
затем выключается и сбрасывается (полярное управление).
требуемого направления осуществляется путем
соответствующей ориентации корпуса аппарата. При управлении баллистическими
ракетами дальнего действия и ракетами-носителями космических аппаратов
маршевый двигатель обычно работает в течение нескольких минут непрерывно, а
затем выключается и сбрасывается (полярное управление).
При этом в течение работы двигателя управление ориентацией может осуществляться с помощью газовых рулей. Эти рули изготавливаются из
жаропрочных
материалов и устанавливаются в струе газов, вытекающих из сопла маршевого
двигателя (рисунок 2.15). При повороте руля на некоторый угол δ
, газовая струя создает газодинамическую силу ![]() , поворачивающую корпус ракеты вокруг ее центра
масс. Кроме того, может поворачиваться камера сгорания и сопла реактивного
двигателя.
, поворачивающую корпус ракеты вокруг ее центра
масс. Кроме того, может поворачиваться камера сгорания и сопла реактивного
двигателя.
В качестве рулей также могут использоваться рулевые или корректирующие двигатели. При управлении космическими аппаратами с целью экономии топлива управление полетом осуществляется обычно путем всего нескольких сравнительно кратковременных включений маршевого двигателя. При этом для упрощения двигателя величина его силы тяги обычно не имеет плавной регулировки, т. е. двигатель может работать только в режиме «включено—выключено»
Процессом управления ЛА называется удерживание его центра массы на заданной или вырабатываемой в процессе управления траектории. Как правило, процессу управления предшествует процесс стабилизации ЛА. Процессом стабилизации называется сохранение определенного углового положения ЛА относительно траектории полета. Устройство, стабилизирующее угловое положение ЛА, называется автопилотом.
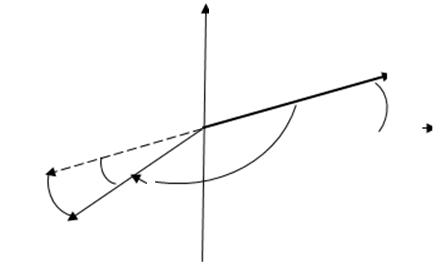
8. Полярное управление можно подразделить на два вида:
- управление с экономией крена;
- управление без экономии крена.
Различие этих видов полярного управления иллюстрируется рисунком 2.7.
 |
![]()
![]()
z
![]()
![]()
![]()
![]()
![]()
Рисунок 2.7 – Пояснение видов полярного управления
Пусть
в процессе управления требуется резко изменить направление ускорения (от ![]() до
до ![]() ). Это изменение можно осуществить двумя способами.
). Это изменение можно осуществить двумя способами.
Первый способ заключается в том, что руль крена поворачивает вектор ускорения
на угол ![]() , а руль глубины не меняет своего положения.
, а руль глубины не меняет своего положения.
Второй способ заключается в том, что руль глубины меняет свое отклонение на
противоположное, изменяя знак ускорения на обратный (от![]() ), а руль крена поворачивает вектор ускорения на
угол
), а руль крена поворачивает вектор ускорения на
угол ![]()
Первый способ соответствует управлению без экономии крена, второй – с
экономией крена, так как при втором способе требуется меньше изменения угла
крена φ. При управлении без экономии крена изменение направления
ускорения во всех случаях осуществляется рулем крена без участи я руля глубины.
Во втором случае в некоторых ситуациях (при ![]() ) руль глубины участвует в изменении направления
ускорения, создавая изменение знака ускорения на обратный.
) руль глубины участвует в изменении направления
ускорения, создавая изменение знака ускорения на обратный.
На рисунке 2.8 приведена схема полярного рулевого управления.
При отклонении руля глубины РГ вверх (на рис. 2.8 по часовой стрелке) набегающий на руль воздушный поток создает момент Мрг,
![]() xр
xр
 |
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() zр
zр![]() Y
Y
![]()
 РК
РК
xр
РК
РК
xр
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.