
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
 РГ
РГ
![]()
![]()
![]()
 δ
δ
Воздушный поток
![]() МРГ
МРГ
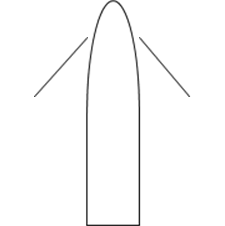
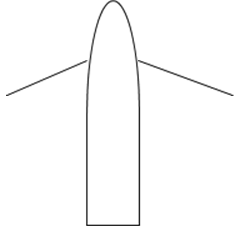
Рисунок 2.8 – Схема полярного рулевого управления
поворачивающий корпус летательного аппарата вокруг оси zр против часовой стрелки. Поворот корпуса вокруг оси zp прекращается, когда вращающий момент, создаваемый воздушным потоком, обтекающим корпус (и действующий в данном случае по часовой стрелке), уравновешивает вращающий момент Мрг, создаваемый рулем глубины. При этом установившееся значение угла αа между продольной осью ракеты и вектором ее скорости Vр (называемого углом атаки) оказывается примерно пропорциональным углу поворота руля δ (при небольших значениях углов).
Результирующая
"аэродинамическая сила ![]() , создаваемая набегающим на корпус
летательного аппарата воздушным потоком, может быть разложена на составляющие
, создаваемая набегающим на корпус
летательного аппарата воздушным потоком, может быть разложена на составляющие ![]() и
и ![]() . При этом величина нормальной составляющей
. При этом величина нормальной составляющей ![]() , называемой подъемной силой,
пропорциональна углу αа (при малых углах αа
).
, называемой подъемной силой,
пропорциональна углу αа (при малых углах αа
). ![]() - лобовое сопротивление.
- лобовое сопротивление.
Подъемная
сила ![]() создает поперечное ускорение
создает поперечное ускорение ![]() ,
,
пропорциональное
этой силе. Следовательно, отклонение руля глубины РГ на некоторый угол δ
создает в установившемся режиме поперечное ускорение![]() , модуль которого пропорционален углу
отклонения руля. Если руль глубины повернется на такой же угол δ , но в
противоположном направлении (т. е. против часовой стрелки), то корпус аппарата
повернется также в противоположном направлении (по часовой стрелке), и
подъемная сила
, модуль которого пропорционален углу
отклонения руля. Если руль глубины повернется на такой же угол δ , но в
противоположном направлении (т. е. против часовой стрелки), то корпус аппарата
повернется также в противоположном направлении (по часовой стрелке), и
подъемная сила ![]() , а следовательно, и ускорение
, а следовательно, и ускорение ![]() изменят свое направление на противоположное. При
этом, если ось zр, жестко связанная с крылом
аппарата, горизонтальна, то ускорение
изменят свое направление на противоположное. При
этом, если ось zр, жестко связанная с крылом
аппарата, горизонтальна, то ускорение ![]() всегда будет расположено в
всегда будет расположено в
вертикальной плоскости.
Если
требуется создать ускорение ![]() в другой плоскости, то
в другой плоскости, то
корпус аппарата поворачивается вокруг своей продольной оси xp на
некоторый угол, называемый углом крена и создаваемый рулем крена РК[1].
Например,
если с помощью рулей крена установится угол крена, равный 90°, то отклонение
руля глубины будет создавать ускорение ![]() уже не
уже не
в вертикальной, а в горизонтальной плоскости.
Таким образом с помощью рулей глубины и крена может быть получено требуемое
значение величины и направления поперечного ускорения ![]() аппарата.
аппарата.
9. На рисунке 2.9 приведены схемы симметричного и несимметричного декартового рулевого управления. При симметричном декартовом управлении аэродинамические формы объекта в плоскостях одинаковы; поэтому эффективность рулей высоты и поворота одинакова, и поворот ракеты вокруг продольной оси на 900 не изменяет режима ее полета. При несимметричном декартовом управлении эффективность действия руля высоты не равна эффективности действия руля глубины (под эффективностью понимается изменение ускорения, вызываемое отклонением руля, на единицу этого отклонения).
yр![]()
![]() yр
yр
 А
РП B
А
РП B
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]() А РП B
А РП B
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() РВ РВ zр РВ zр
РВ РВ zр РВ zр
D РП C D C
![]()
![]() xр xр
xр xр
 |
 |
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() zрzр
zрzр
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() РВ
РВ
РВ РП РВ РП
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.