а) б)
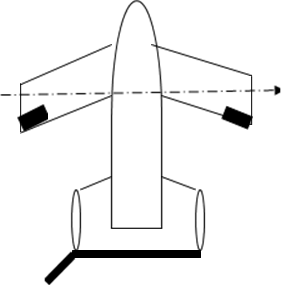
Рисунок 2.9 – Элементы декартова управления
а) симметричное; б) несимметричное
При несимметричной декартовой схеме необходима гиростабилизация корпуса ракеты от поворотов вокруг продольной оси.
При
декартовой схеме управления составляющие поперечного ускорения в вертикальной и горизонтальной
плоскостях,![]() и
и ![]() , создаются соответственно с помощью руля высоты РВ
и руля поворота РП. Принцип действия каждого из этих рулей аналогичен
описанному выше принципу действия руля глубины. При отклонении руля высоты
корпус аппарата поворачивается вокруг оси zр и создается
подъемная сила, а следовательно, и поперечное ускорение в вертикальной
плоскости. Отклонение руля поворота РП вызывает поворот корпуса аппарата вокруг
оси yР и создание
подъемной силы и поперечного ускорения в горизонтальной плоскости.
, создаются соответственно с помощью руля высоты РВ
и руля поворота РП. Принцип действия каждого из этих рулей аналогичен
описанному выше принципу действия руля глубины. При отклонении руля высоты
корпус аппарата поворачивается вокруг оси zр и создается
подъемная сила, а следовательно, и поперечное ускорение в вертикальной
плоскости. Отклонение руля поворота РП вызывает поворот корпуса аппарата вокруг
оси yР и создание
подъемной силы и поперечного ускорения в горизонтальной плоскости.
При декартовом управлении руль крена выполняет лишь вспомогательную функцию - стабилизацию крена аппарата. При появлении какого-либо возмущающего момента, вызывающего крен аппарата (т. е. поворот его корпуса вокруг оси xР), руль крена создает противоположный момент, возвращающий корпус в исходное положение. Конструктивно руль крена может быть при этом совмещен с рулем высоты или рулем поворота.
При комбинированном управлении требуемое изменение ускорения производится в общем случае совместным действием рулей высоты, поворота и крена.
10. На рисунке 2.10 изображена схема комбинированного управления. С корпусом ракеты связана система 0xyz. Начало координат 0 находится в центре тяжести ракеты. В схеме величина и направление поперечного ускорения изменяются за счет действия руля высоты РВ, руля поворота РП и руля крена РК.
x
 |
![]() z
z
РК 0 РК
![]()
![]()
![]() К К
К К
РП РВ
Рисунок 2.10 – Элементы комбинированного управления ракеты
Наибольшее распространение получили две аэродинамические схемы снарядов: крестокрылая и плоскокрылая .
Аэродинамическую
силу, действующую на руль перпендикулярно к его поверхности ![]() можно разложить на две составляющие: продольную Fрп (по направлению
вектора скорости снаряда) и поперечную Fр
(перпендикулярную вектору скорости). Продольная - лишь немного увеличивает
лобовое сопротивление снаряда и нас интересовать не будет. Под действием силы
можно разложить на две составляющие: продольную Fрп (по направлению
вектора скорости снаряда) и поперечную Fр
(перпендикулярную вектору скорости). Продольная - лишь немного увеличивает
лобовое сопротивление снаряда и нас интересовать не будет. Под действием силы ![]() , проходящей через центр приложения аэродинамических
сил руля А, снаряд начнет разворачиваться вокруг центра масс О (точка
приложения силы Т), что приведет к изменению угла скольжения αс
между вектором скорости и осью снаряда. Это, в свою очередь, приведет к
изменению аэродинамической силы
, проходящей через центр приложения аэродинамических
сил руля А, снаряд начнет разворачиваться вокруг центра масс О (точка
приложения силы Т), что приведет к изменению угла скольжения αс
между вектором скорости и осью снаряда. Это, в свою очередь, приведет к
изменению аэродинамической силы ![]() , которая возникает за счет действия потока воздуха
на крылья и корпус снаряда, и к появлению попречной составляющей
, которая возникает за счет действия потока воздуха
на крылья и корпус снаряда, и к появлению попречной составляющей ![]() силы тяги двигателя
силы тяги двигателя ![]() . Сила
. Сила ![]() проходит через центр приложения аэродинамических
сил снаряда В.
проходит через центр приложения аэродинамических
сил снаряда В.
Для крестокрылых снарядов механизм разворота в вертикальной плоскости аналогичен рассмотренному; следует лишь дополнительно учитывать проекцию силы тяжести снаряда на ось, перпендикулярную вектору скорости, лежащую в вертикальной плоскости.
При крестообразном расположении крыльев существуют две аэродинамические схемы ракет: обычная и типа «утка». В первом случае рулевые функции выполняет хвостовое оперение, во втором – рули размещаются в носовой части (повижные управляющие крылья, неподвижное хвостовое оперение). У снарядов с аэродинамической симметрией для управления применяют декартову систему.
Плоскокрылые снаряды (самолеты - снаряды) имеют одну пару сильно развитых крыльев. Однако при самолетной компоновке ЛА – плоскокрылый снаряд (рис.2.12) может применяться и декартово рулевое управление.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.