 |
|||
![]()
![]()
![]()
 |
||||
 |
||||
Измерительная радиосистема
 |
|||
 |
|||
Ключ 2
![]()
![]()
Земля Борт
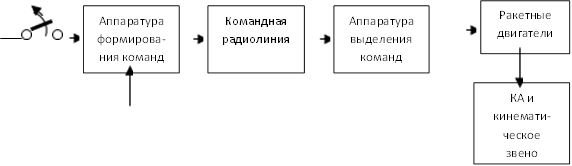
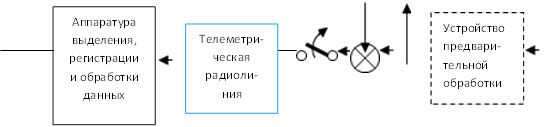
Рисунок 9.14 – Функциональная схема корректирующей системы управления с КП
Функциональная схема корректирующего радиоуправления с наземного командного пункта приведена на рисунке 9.14.
Фактические
параметры движения центра масс КА характеризуются шестимерным вектором ![]() . С помощью измерительных радиосистем производится
оценка значений этих параметров, в результате которой находится расчетный
шестимерный вектор
. С помощью измерительных радиосистем производится
оценка значений этих параметров, в результате которой находится расчетный
шестимерный вектор ![]() . В ЦВМ по найденному
. В ЦВМ по найденному ![]() вычисляется расчетная траектория движения КА и
находится ее отличие от номинальной траектории, определяемой совокупностью
параметров
вычисляется расчетная траектория движения КА и
находится ее отличие от номинальной траектории, определяемой совокупностью
параметров ![]() . Анализируя отклонения расчетной траектории от
номинальной, оператор принимает решение о целесообразности проведения коррекции
движения КА, определяет подходящую попадающую траекторию и с помощью ЦВМ
вычисляет программу коррекции. Ключи на схеме показывают, что работа системы
осуществляется сеансами. Синхронизация системы обеспечивается сигналами точного
времени
. Анализируя отклонения расчетной траектории от
номинальной, оператор принимает решение о целесообразности проведения коррекции
движения КА, определяет подходящую попадающую траекторию и с помощью ЦВМ
вычисляет программу коррекции. Ключи на схеме показывают, что работа системы
осуществляется сеансами. Синхронизация системы обеспечивается сигналами точного
времени ![]() .
.
Для управления движением центра масс космических летательных аппаратов служат корректирующие и тормозные двигательные установки. Включение тормозных и корректирующих двигательных установок производится только после того, как космический летательный аппарат будет ориентирован соответствующим образом в пространстве и обеспечена его стабилизация с тем, чтобы вектор тяги двигательной установки был повернут в нужном направлении.
Для того чтобы осуществить требуемый корректирующий импульс, необходимо направить продольную ось летательного аппарата под строго определенным углом к его траектории и к плоскости орбиты.
Корректирующие двигательные установки используются также для торможения при запуске искусственных спутников Луны или планеты. Такая двигательная установка позволяет перевести космический летательный аппарат с траектории пролета мимо планеты на орбиту искусственного спутника планеты.
40. Управление
бортовой аппаратурой
с командного пункта производится с помощью системы, которую будем называть радиотелемеханической
(рисунок 9.16). Фактическое состояние бортовой аппаратуры и окружающей среды,
характеризуемое вектором состояний ![]() , где, например,
, где, например, ![]() - напряжение батарей питания,
- напряжение батарей питания, ![]() - давление и т.д., фиксируется соответствующими
бортовыми датчиками. В перерывах между сеансами связи показания датчиков могут
записываться в бортовом запоминающем устройстве (ЗУ). Во время сеансов связи
запомненные, а также текущие показания датчиков через телеметрическую
радиолинию поступают на наземный КП.
- давление и т.д., фиксируется соответствующими
бортовыми датчиками. В перерывах между сеансами связи показания датчиков могут
записываться в бортовом запоминающем устройстве (ЗУ). Во время сеансов связи
запомненные, а также текущие показания датчиков через телеметрическую
радиолинию поступают на наземный КП.
 |
|||
 |
|||
![]()
![]() Командная радиосистема
Командная радиосистема ![]()
![]()
![]()
![]()
 |
 |
 |
|||||
![]()
![]()
![]()
![]()
 |
|||||||||||
![]() Ключ 1
Ключ 1
![]()
 |
|||
![]() Телеметрическая
радиосистема
Телеметрическая
радиосистема
![]()
![]()
 |
|||
Ключ 2
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.