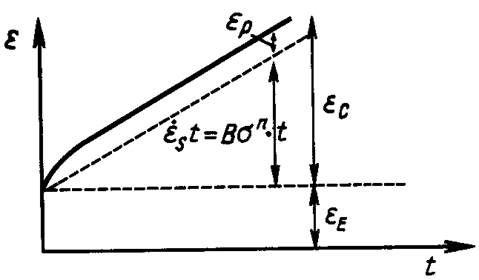
В первом примере будем предполагать, что полная деформация ползучести представима в виде суммы деформаций первого и второго этапов f 14]
Здесь
), e= Во-".
Этот тип модели с применением полных деформаций часто используется в методе конечных элементов ; здесь необходимо найти шесть материальных констант: К, m, a, Ь, В к п. Константы определяются по стандартным кривым ползучести следующим образом (рис. 11.2).
а . По данным об установившейся ползучести вычисляем константы В я п.
Ь . Формируем составляющую деформации первой фазы ползучести
Находим предел, к которому стремится эта деформация с ростом времени. Установлено, что зависимость данного предела s °° от напряжений в логарифмических координатах примерно линейная; следовательно, можно найти константы К и т , для которых
Ер0 = Кст.
с. Формируем величину (1 - е /6°^). Установлено, что эта величина с увеличением времени экспоненциально убывает и в значительных пределах не зависит от напряжения. Следовательно, можно найти оставшиеся две константы а и Ь, для которых а* = ]-вр/е-=«е-*',
используя, например, метод наименьших квадратов для обработки всей совокупности данных.
В качестве второго примера рассмотрим модель Бейли — Орована (разд. 2.3), в которой требуется определить четыре материальные константы- kt, k2, т и п. Эти константы определяются следующим образом [15].
11.1.Моделирование поведения материала при проектировании
307
Рис, 11.2. Косвенная идентификация модели ползучести, использующей полную деформацию.
-at
а. По данным об установившейся ползучести вычисляем В = kltk2и п.
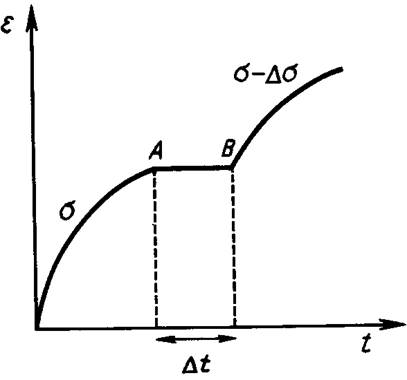
б. Проводим ряд опытов на обратную ползучесть, в которых напряжение на стадии установившейся ползучести уменьшается на величину Асг. Если разгрузка происходит в точке А (рис. 11.3), то будет
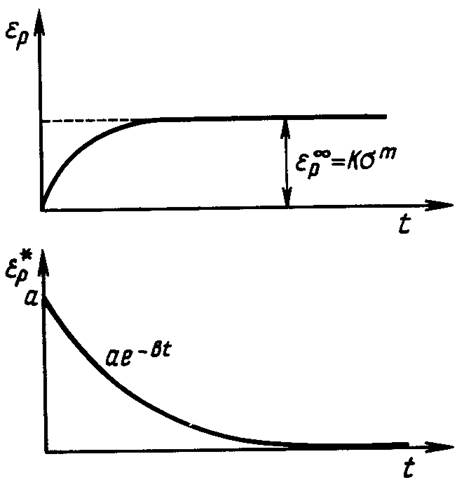
Рис. 11.3. Косвенная идентификация модели ползучести Бейли — Орована.
308
Глава 11.Проектарование конструкций с учетом ползучести
существовать период Д t, на протяжении которого скорость деформации ползучести равна нулю, после чего, начиная с точки В, наступает этап роста деформации, продолжающийся до установления, причем скорость вновь установившейся ползучести будет меньше той, которая была перед разгрузкой. В течение данного промежутка текущее напряжение Rуменьшается от а до о- — Да, причем
dR/dt= -r(R) = kl| R\n~m.
Функцию г можно определить, переходя к пределу при Да -+0; при этом начальный уровень напряжений для нее будет равен а, | а | = R. В логарифмических координатах данная функция будет примерно линейной; следовательно, константы klи (п - т) можно найти методом наименьших квадратов.
Очевидно, что метод прямой идентификации содержит несколько простых и ясных процедур, при реализации которых от исследователя не требуется никаких субъективных решений. Однако, как уже отмечалось, этот метод неприменим в случае теорий с внутренними параметрами состояния. В то же время метод косвенной идентификации учитывает историю процессов деформирования и является более предпочтительным. Недостатком метода косвенной идентификации является отсутствие оценок возможных вариаций параметров; эти оценки можно найти, используя стандартные формулы метода прямей идентификации.
11.1.3. Корреляция и экстраполяция данных
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.