Численные результаты особого интереса не представляют, поскольку и материал, и история нагружения выбраны достаточно произвольно. Однако некоторые качественные особенности поведения конструкции все-таки можно выявить. В частности, из кривых на рис. 7.13 видно, что процесс деформирования имеет четыре различных этапа. За начальной упругой деформацией следует этап быстрого роста деформаций "ползучести", накапливаемых в течение очень короткого промежутка времени — на самом деле это обычная пластическая деформация. Далее следует начальная стадия ползучести и, наконец, этап установившейся ползучести, который прерывается скачкообразным ростом нагрузки.
7.6. ЧИСЛЕННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ ТЕОРИИ НЕУСТАНОВИВШЕЙСЯ ПОЛЗУЧЕСТИ МЕТОДОМ КОНЕЧНЫХ ЭЛЕМЕНТОВ
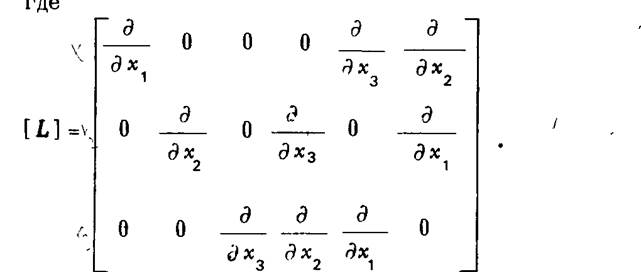
В этом разделе мы кратко обсудим практическую реализацию описанных выше алгоритмов численного интегрирования в методе конечных элементов. Остановимся лишь на основных особенностях метода. Используемые обозначения в основном стандартные: симметричные тензоры напряжений и деформаций представляются шестикомпонентными векторами а и с, поле вектора перемещений — трехкомпонентным вектором и. Связь деформаций с перемещениями определяется линейным дифференциальным оператором • -[I]»,
(7.29)
где
[Il-v.
|
" д |
0 |
П |
0 д |
а ~ |
|
а*, |
Эх |
д*2 |
||
|
о |
д |
о |
3о |
д |
|
дхг |
дх3 |
дх, |
||
|
о |
0 |
д |
д д |
о |
|
(>Х |
дх f)x |
|||
|
_ |
3 |
2 1 |
__ |
Полная деформация представляется суммой упругой деформации е£ и дефор-
мации ползучести е :
• = ЕЕ "С ,<7-30>
причем упругая деформация линейно связана с напряжением:
« = [D]«E. (7.31)
где [D] — матрица упругих модулей размерности 6х 6. Для простоты температурными деформациями будем пренебрегать.
7.6. Метод конечных элементов
205
Основная идея метода конечных элементов в перемещения к состоит в том, что исследуемая конструкция заменяется ее моделью, представляющей собой объединение конечного числа простых элементов конечных размеров (рис. 7.16). Эти элементы соединяются друг с другом в конечном числе точек, называемых узлами. Вектор перемещений и в любой внутренней точке элемента выражает» ся с использованием заданных функций формы [N] в виде u = [N] а , где
с се
вектор а - набор некоторых параметров, в исходной формулировке метода совпадающих с перемещениями узлов, хотя это, вообще говоря, не обязательна
Обозначая через а совокупность искомых параметров, через которые выражается приближенное решение, можно формально объединить локальные аппроксимации поля и в единую формулу
и = [ЛГ]а, (7.32)
размерность вектора а в которой зависит, разумеется, от разбиения области на элементы.
В методике перемещений строятся уравнения для определения вектора а., однако метод можно приспособить и для вывода уравнений, описывающих неустановившуюся ползучесть. Здесь вместо того, чтобы строить задачу Коши на основе результатов разд. 7.3, применен (для иллюстрации) другой путь -необходимые уравнения выводятся из первого закона термодинамики.
Начнем, как это обычно делается в большинстве вариантов метода конечных элементов, с формулы Грина (уравнения принципа возможных перемещений). Пусть в — поле напряжений, уравновешивающее заданные массовые силы плотностью Ь и поверхностные нагрузки р на части граничной поверхности S а деформации и перемещения кинематически допустимы. При этом имеет место равенство
Г
- Г iJbdV - Гс uTpdS= О, v
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.