Замечание 2.8. Физически система может не иметь некоторых состояний, принадлежащих пространству Zф , определенного сугубо формальным способом. В этом случае считается, что система может находиться только в состояниях, образующих так называемое истинное множество состояний Z Ì Zф [13,15].
З а м е ч а н и е 2.9. Некоторые авторы расширяют пространство состояний системы, включая в него дополнительные координаты, в первую очередь, время.
Для описания динамики состояния системы используется представление о том, что каждому состояниюсистемы в момент времени t соответствует определенная точка пространства состояний или изображающая точка, имеющая координаты (z1(t) , z2(t) , … , znz(t)) Тогда каждому процессу функционирования системы на некотором интервале времени будет соответствовать некоторая совокупность изображающих точек, называемая фазовой траекторией (траекторией системы в пространстве состояний)..
Отметим, что при описании фазовой траектории системы на интервале времени [0 , t] обязательно должно быть задано начальное состояние системы
Z(0) = Z0 = ( z1(0) , z2(0) , … , znz(0)) , соответствующее моменту времени t0=0.
Значения характеристик состояния z1(0) , z2(0) , … , znz(0) называются начальными условиями.
На рис 2.1 приведен пример фазовой траектории некоторой системы, функционирующей на интервале времени Т = [t0 , t ]. Пространство состояний такой системы является трехмерным.
![]() z3
z3
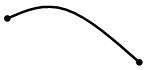 |
Z(t0)
Z(t)

![]() 0 z2
0 z2
z1
Рис 2.1
Отметим, что фазовая траектория является параметрической кривой. Это означает, что каждому значению параметра t Î [t0 , t ] соответствует некоторая точка кривой.
З а м е ч а н и е 2.10. В принципе для описания процесса изменения состояния системы могла быть использована вектор-функция Z(t) или соответствующая ей совокупность графических зависимостей zi(t) (i=1,2,..,nZ). Однако такое представление обычно не обладает необходимой наглядностью и обозримостью.
Изменяя начальные условия, можно получить семейство фазовых траекторий, которое называется фазовым портретом системы.
2.1.3. Собственные параметры системы
Помимо описания взаимодействия системы с внешней средой и процесса изменения ее состояния при моделировании системы вводятся характеристики, описывающие собственные свойства системы. Такие характеристики называются собственными (внутренними) параметрами системы.
Такие параметры в общем случае описывают количественные характеристики элементов системы и структуру системы.
Рассматриваемые параметры задаются вектором собственных параметров
H = (h1 , h2 , … , hnh) .
Такой вектор имеет nH координат
Пример. Собственные параметры пружинного маятника – масса груза и жесткость пружины.
Существенно то, что в отличии от других характеристик системы при моделировании собственные параметры системы считаются постоянными величинами, не изменяющимися в процессе функционирования системы.
З а м е ч а н и е 2.11. Собственные параметры играют основную роль при решении задачи проектирования системы, поскольку определение этих параметров с формальной точки зрения и является целью проектирования. В рамках этой задачи собственные параметры системы называют переменными проектирования.
З а м е ч а н и е 2.12. Некоторые собственные параметры могут изменяться в процессе управления системой. Такие задачи в данном курсе не рассматриваются.
При моделировании собственные параметры системы трактуются как независимые переменные и входят в группу экзогенных переменных.
2.2 Виды структур функциональных математических моделей систем
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.