 . (3.114)
. (3.114)
В формулах (3.113) и (3.114) производные от ωJPψ и –ωJPψ суть гироскопические члены, обращающиеся в нуль при ω = 0, т.е. при отсутствии вращения вала. Они равны с точностью до малых второго порядка проекциям на оси x и у отклоненного вследствие изгиба вала вектора момента количества движения при вращении вокруг оси s.
Проекции моментов количества движения диска на оси x и у показаны на рис. 3.62,а,б.
В качестве проекций сил и проекций моментов сил в уравнениях (3.113) и (3.114) приняты проекции сил и моментов сил упругости, действующие со стороны вала на диск, пропорциональные соответствующим перемещениям диска. Эти силы выражаются с помощью коэффициентов жесткости с11 , с12 = с21 , с22 , которые имеют такие выражения:

|
|
|
|
|
|
|
|
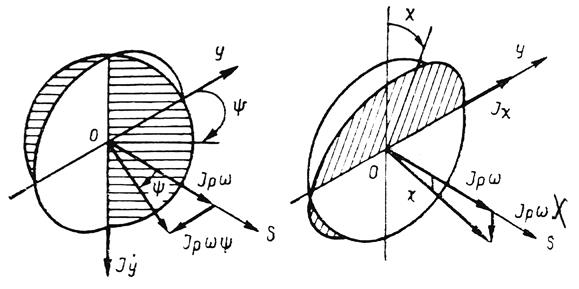
Рис. 3.62. Моменты количества движения диска
Знаки плюс и минус перед коэффициентами жесткости внутри скобок в правых частях уравнений (3.113) и (3.114) соответствуют знакам проекций сил и моментов, действующих со стороны вала на диск согласно рис. 3.63,а,б,в,г.
 |
Рис. 3.63. Силы, действующие на диск
Из формул (3.113) и (3.114) непосредственно получается система дифференциальных уравнений колебаний вала
 (3.115)
(3.115)
Сделав замену y – jx= z, ψ + jχ = 0, а затем, умножив первое и четвертое уравнения на jи сложив со вторым и третьим, получим два комплексных уравнения
 . (3.116)
. (3.116)
Подстановка z= Zejλt, θ = Θejλt в уравнениях (3.116) приводит к алгебраическому уравнению частот
 (3.117)
(3.117)
которое имеет при любом значении ω
два положительных и отрицательных корня. Если заменить ω на –ω,
то это будет равносильно замене λ на
-λ, а поэтому вся кривая, изображающая зависимость λ от ω,
состоит из двух пар ветвей, расположенных кососимметрично относительно осей координат
ω, λ. Для полной характеристики кривой достаточно пользоваться
одной парой ветвей, расположенной в положительной области частот, поэтому
интервал для угловой скорости ω надо рассматривать от –∞ до +∞, а интервал
собственных частот λ – от 0 до +∞.
Критическая скорость может быть определена, если в уравнении (3.117) положить λ = ω = ω0, а затем найти корни полученного уравнения.
 . (3.118)
. (3.118)
Если прикрепленный диск имеет малую толщину по сравнению с его диаметром, то его полярный момент инерции больше экваториального, т.е. JP > J; тогда уравнение (3.118) будет иметь один вещественный положительный корень, а вал одну критическую скорость прямой прецессии.
Если же прикрепленное к валу тело имеет удлиненную вдоль вала форму, то для него JP < J, и уравнение (3.118) будет иметь два вещественных положительных корня, в соответствии с чем появятся две критические скорости прямой прецессии вала.
Графики зависимостей λ = λ(ω), построенные для случаев JP = 2J и JP = J/2, показаны на рис. 3.64 и 3.65.
При наличии дебаланса вала – смещения а центра дифференциальных уравнений (3.116) будем иметь следующие:
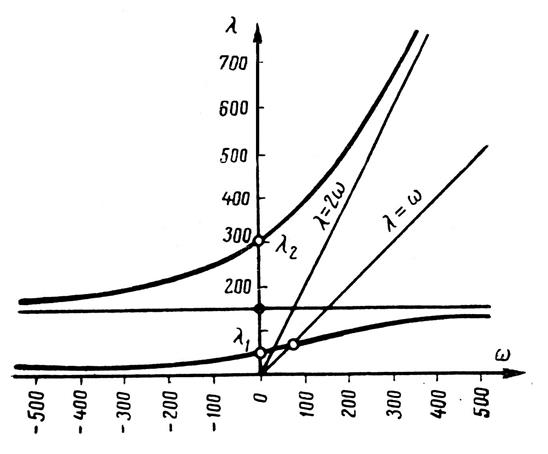
Рис. 3.64. Зависимость между λ и ω для консольного вала
с диском на конце
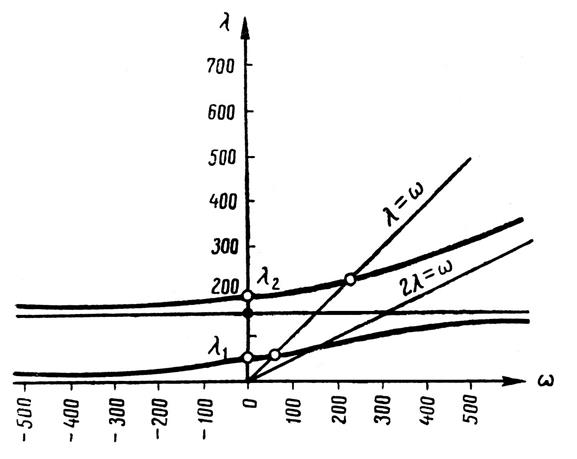
Рис. 3.65. Зависимость между λ и ω для вала,
имеющего на конце тело вытянутой по оси формы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.