Изучение изгибных колебаний вращающегося вала начинается с рас-
смотрения движения сечения, в котором прикреплена деталь (диск). Это движение слагается из деформаций вала и его вращения.
Рассмотрим сначала движение по отношению к неподвижной системе координат xys, оси которой расположены так: ось x вертикальна и направлена вниз, ось у горизонтальна, ось s направлена к наблюдателю и совпадает с осью вала. Начало О координат расположено на линии опор. Вал будем считать вращающимся с постоянной угловой скоростью и против часовой стрелки.
Колебательные движения центра сечения характеризуются его перемещениями в направлении х и у, поворот сечения — углами поворота φ и d вокруг осей х и у (рис. 3.55). Колебательные движения центра и поворот сечения могут быть отнесены с деталями (диску), непосредственно связанной с этим сечением, если эту деталь считать, как это делается в большинстве случаев, абсолютно жесткой, т.е. недеформируемой.
|
|
|
|
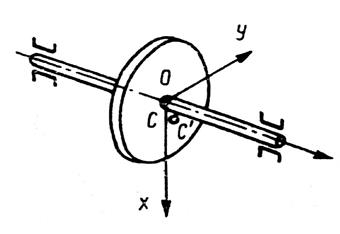
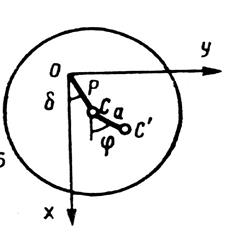
Рис. 3. 55. Гибкий вал с неуравновешенным диском
Если диск, прикрепленный к
валу, неуравновешен (т.е. если центр тяжести диска не совпадает с центром
сечения вала), то движение центра массы диска может быть представлено в виде
движения концов суммы двух векторов: вектора ![]() ,
, ![]() , характеризующего и неуравновешенность.
, характеризующего и неуравновешенность.
Движение удобно описывать с помощью комплексного представления векторов, а именно;
![]() (3.86)
(3.86)
В простейших случаях приходится иметь дело с таким движением, при котором центр вала описывает эллипс, а вектор неуравновешенности вращается в плоскости с угловой скоростью ω вала. В таких случаях движение центра массы описывается выражением
![]() , (3.87)
, (3.87)
где U, Vи λ — постоянные величины.
Геометрически такое движение представляется как сумма трех векторов постоянной длины (рис. 3.56), из которых два вращаются в противоположные стороны с угловой скоростью λ, а третий с угловой скоростью ω вращения диска (вала). Если одна из постоянных величин Uили Vравна нулю, то движение будет слагаться из кругового движения центра вала и кругового движения вектора неуравновешенности.
 |
|
|||
будет прямым, если U> V, и обратным, если U < V.
В первом случае конец результирующего вектора (или что, та же точка на эллипсе) будет двигаться против часовой стрелки, во втором — по часовой стрелке.
Если в частном случае V =0 и λ = φ, т. е. скорость прямой прецессии равна скорости вращения диска вала, то движение можно представить выражением
![]() . (3.88)
. (3.88)
Прецессия есть результат сложения колебаний в двух взаимно перпендикулярных направлениях. Чтобы это наглядно представить, рассмотрим систему координат ξηsс началом точки О, вращающуюся вместе с валом с угловой скоростью ω. Оси этой системы будем ориентировать так, чтобы ось ξ была направлена вдоль вектора неуравновешенности.
Имеем такое преобразование координат
 (3.89)
(3.89)
где ξ и h— прогибы вала в системе ξηs.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.