Таким чином, основною перевагою застосування насосів з постійною подачею в гідросистемі стендів є сталість величини тиску на вході у випробовуваний привод незалежно від його гідравлічного опору, тому такі схеми набули широкого застосування. Істотним недоліком гідросистем з такими насосами є їх низький ККД, тому що надлишок робочої рідини постійно перепускається в зливальну магістраль, що приводить до нагрівання рідини і вимагає застосування спеціальних теплообмінників для її охолодження.
У гідросистемах стендів, призначених для проведення ресурсних випробувань, коли вимога забезпечення не обов'язкова, використовують насоси з перемінною подачею, з різними типами регуляторів, що автоматично встановлюють подачу, рівну споживанню. Схеми гідростендів з цими насосами є більш економічними і не вимагають додаткових теплообмінників для охолодження.
Способи імітації керуючого впливу. Загальноприйнятою нормою формування керуючої функції при визначенні динамічних характеристик привода і при ресурсних випробуваннях є застосування гармонійного керуючого впливу, що має, як правило, синусоїдальну форму.
Для імітації синусоїдального керуючого впливу при стандартних випробуваннях широко застосовують пристрої, що одержали назву синусозадатчиків чи синусних механізмів. При випробуваннях слідкуючого гідроприводу з електроуправлінням застосовують низькочастотні генератори періодичних коливань типу НГПК, що є універсальними синусозадатчиками, що забезпечують регулювання частоти керуючого сигналу в широкому діапазоні. Істотним недоліком промислових генераторів є їхня громіздкість, тому що вони вимагають стабілізованого живлення, а також мала тривалість безупинної роботи.
Тому в схемах випробувальних стендів застосовують різні конструкції синусних механізмів, що не мають відзначених вище недоліків.
При випробуваннях гідромеханічних приводів (бустерів) для формування керуючого сигналу застосовують тільки синусні механізми з визначеними характеристиками. За принципом дії синусні механізми підрозділяють на механічні й електромеханічні. На (мал. 80,а) дана кінематична схема механічного синусозадатчика з електроприводом 1, що складається з редуктора з двома черв'ячними парами, двох змінних шестерень г\ і 22 і ексцентрика радіусом К. Для таких конструкцій синусного механізму широко застосовуються електродвигуни типу АТ. Частота циклів у цій схемі змінюється за рахунок підбора відповідних змінних шестірень 2І і 2.2, а значення амплітуди - - величини ексцентриситету К.
Синусозадатчики приведеної схеми при відповідному підборі передатних відносин , забезпечують зміну частоти вхідної ланки випробуваного привода в межах Г = 0,06 — 2 Гц при стабільній статичній характеристиці. До недоліків такої схеми відносять складність виготовлення редуктора, що має кілька черв'ячних пар, а також східчасте регулювання частоти обертання.
При випробуваннях гідроприводів широко застосовують механічні Синусозадатчики з приводом від гідродвигунів. На мал. 80, б представлена кінематична схема синусозадатчика цього типу з використанням у схемі гідромотора 1 типу ГМ-36. При діапазоні потрібної витрати робочої рідини
Опотр = (0,037÷0,46)-103 см3/с синусний механізм при і = 1 забезпечує зміну частоти в межах і= 30 40 Гц.
Регулювання частоти обертання гідромотора виробляється регулятором витрати 2, а для контролю частоти обертання служить тахометрический датчик 3.
Величина амплітуди керуючого вхідного сигналу визначається значенням ексцентриситету К.
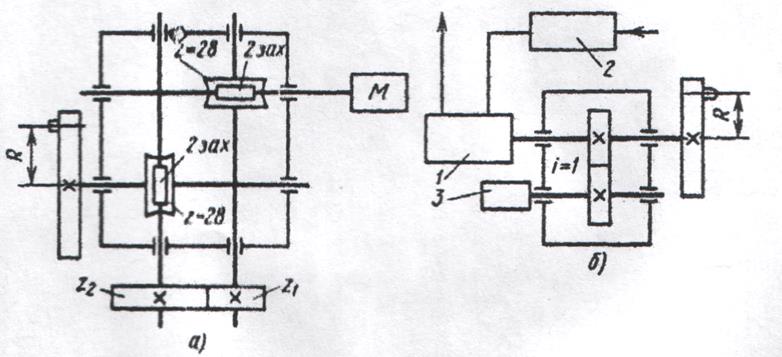
Мал.80
Стендові системи імітації навантаження. При випробуваннях приводів застосовують різні системи навантаження, що імітують силу, яка прикладається до вихідної качалки. За принципом дії ці системи підрозділяють на активні та пасивні.
У гідросистемах стендів, виконаних по активній системі, навантаження на вихідній качалці створюється за рахунок власного джерела енергії у виді насоса, стиснутого газу, пружини і т.п. Це забезпечує можливість навантаження привода як при рухливій, так і при нерухомої вихідній качалці. Пасивну систему виконують без власного джерела енергії і тому навантаження привода, відбувається тільки в процесі функціонування за рахунок його енергії.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.