 |
Статическими, или равновесными, режимами называют такие режимы работы регулятора, при которых центробежная сила грузов уравновешена восстанавливающей силой, т.е. выполняется условие С = Е. В данном разделе рассматриваются условия такого равновесия.
Центробежная сила груза Рц определяется его массой m, радиусом вращения r и угловой скоростью вала регулятора wр. При количестве грузов iгр cуммарная центробежная сила
Рц = iгр m r wр2.
Приведенную к муфте центробежную силу С определяем из условия равенства работ
С z = Рц Dr,
где Dr – радиальное перемещение груза, z – осевое перемещение муфты измерителя (рис. 24).
Отсюда
С = Рц(Dr/z)= Рц(y/r),
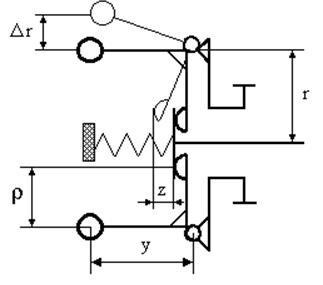 где y, r – плечи приложения сил Рц и
С.
где y, r – плечи приложения сил Рц и
С.
Заменяя текущий радиус r на (rmin + Dr), записываем
Рц = iгр m(rmin + Dr)wр2.
Введем условное начальное значение осевой координаты
z0 = rmin (r/y),
 где rmin –
минимальный радиус вращения грузов.
где rmin –
минимальный радиус вращения грузов.
Далее, учитывая все вышеприведен-ные соотношения координат, находим окончательно зависимость приведенной центробежной силы от перемещения муфты:
C = iгр m wр2 (z0 + z)(r/y)2.
Таким образом, приведенная центробежная сила представляет собой произведение некоторой функции перемещения муфты A(z) на квадрат угловой скорости
С(w, z)= А(z)wр2.
Функция А(z)в первом приближении может считаться линейной, если пренебречь изменением соотношения плеч при перемещении грузов.
Для измерителей с грузами в форме шариков, заключенных между плоской и конусной тарелками (рис. 25),
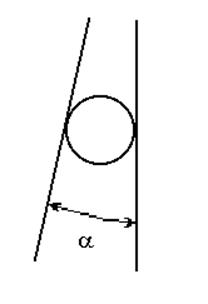 Dr/z = ctga,
Dr/z = ctga,
где a – угол наклона образующей конусной тарелки.
В этом случае
A(z) = iгр m(z0 + z)ctg2a .
 Графически зависимость центробежной
силы от хода муфты изображается линиями (в первом приближении – прямыми)
исходящими из точки (–z0, 0) (рис. 26). Наклон каждой
линии зависит от угловой скорости.
Графически зависимость центробежной
силы от хода муфты изображается линиями (в первом приближении – прямыми)
исходящими из точки (–z0, 0) (рис. 26). Наклон каждой
линии зависит от угловой скорости.
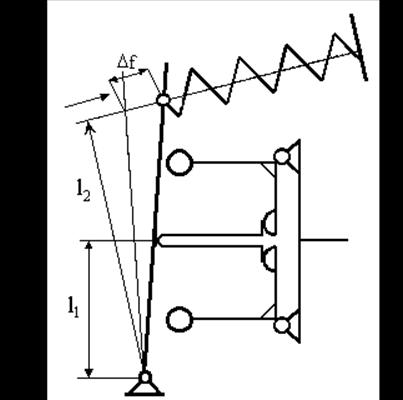
Восстанавливающая сила Е,приведенная к муфте, определяется усилием пружины F и соотношением плеч по отношению к оси рычага, если пружина не соосна муфте (рис. 27). Усилие пружины:
 F = c ( fнач + Df ), где c - жесткость пружины, D f - де-формация
пружины. Учитывая, что
F = c ( fнач + Df ), где c - жесткость пружины, D f - де-формация
пружины. Учитывая, что
 Df = z (l2 /l1),
Df = z (l2 /l1),
 из условия равенства работ E z = F
Df следует:
из условия равенства работ E z = F
Df следует:
E = c[ fнач + z(l2 /l1)](l2 /l1) = Eнач + cпр z, где cпр – приведенная к муфте жесткость пружины, cпр = с(l2 /l12).
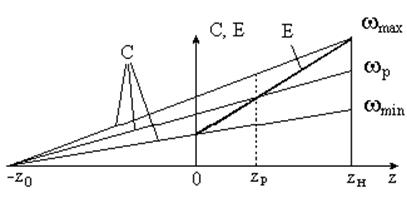 Таким образом, графически функция E(z)
представляет собой прямую линию, наклон которой определяется приведенной жест-костью
пружины, а положение по вертикали – начальным значением восстанавливающей силы
(рис. 28). Совмещая графики E(z) и C(w, z), можно найти
точку равновесия, которая определяет равновесное положение муфты zри соответ-ствующую ему равновесную угловую скорость wр. Пересечение линии восстанавливающей силы с граница-ми
перемещения муфты измерителя определяет нижнюю и верхнюю границы угловой
скорости, под-держиваемые регулятором при данном начальном значении вос-станавливающей
силы. По этим предельным значениям определяется степень неравномерности измерителя,
которая является важнейшим показателем статики и динамики регулятора скорости:
Таким образом, графически функция E(z)
представляет собой прямую линию, наклон которой определяется приведенной жест-костью
пружины, а положение по вертикали – начальным значением восстанавливающей силы
(рис. 28). Совмещая графики E(z) и C(w, z), можно найти
точку равновесия, которая определяет равновесное положение муфты zри соответ-ствующую ему равновесную угловую скорость wр. Пересечение линии восстанавливающей силы с граница-ми
перемещения муфты измерителя определяет нижнюю и верхнюю границы угловой
скорости, под-держиваемые регулятором при данном начальном значении вос-станавливающей
силы. По этим предельным значениям определяется степень неравномерности измерителя,
которая является важнейшим показателем статики и динамики регулятора скорости:
d = (wmax – wmin)/wср = 2(wmax – wmin)/(wmax + wmin)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.