График на рис. 28 позволяет также судить об устойчивости измерителя скорости: если в точке пересечения линий восстанавливающей и центробежной силы между ними образуется положительный угол, измеритель устойчив. Границей устойчивости является безразличное равновесие, когда линии С и Е совпадают. Количественно устойчивость измерителя скорости характеризуется фактором устойчивости
Если эта величина положительна,
измеритель устойчив.

Для того, чтобы установить
связь между степенью неравномерности и параметрами измерителя, умножим и
разделим выражение для степени неравномерности на среднюю угловую скорость и
величину Аmax(z), т.е. на значение А, соответствующее
номинальному ходу муфты. Имея в виду, что A(z)w2 = C, получаем (рис. 29)

Учитывая, что
находим

То есть степень неравномерности
и фактор устойчивости пропорциональны. Этот вывод принципиально важен,
так как указывает на связь между устойчивостью и точностью регулирования. Далее
учитываем, что:

И полагая, что
![]() окончательно
окончательно
Таким образом, при данной конструкции и настройке частоты вращения регулятора степень неравномерности определяется приведенной жесткостью пружины
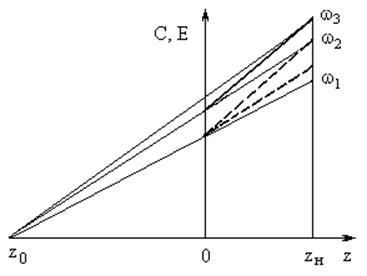
Как видно на рис. 30, заданный диапазон равновесных скоростей измерителя можно изменять, увеличивая или уменьшая начальную деформацию пружины. При этом изменяется и степень неравномерности – уменьшается с ростом частоты вращения. Одновременно уменьшается фактор устойчивости, так что при каком-то значении начальной деформации пружины линии Е и С совпадут (безразличное равновесие – верхняя линия на рис. 30).
К такому же выводу приводит
анализ формулы для степени неравномерности. Как из формулы, так и из рис. 30
следует, что изменение степени неравномерности при переходе от одной заданной
скорости к другой тем значительнее, чем больше отношение Drн/rmax. С этой точки зрения
целесообразно уменьшать это отношение, что, однако, требует увеличения радиуса
вращения грузов, т.е. ведет к увеличению габаритов измерителя. Практически это
отношение выдерживается в диапазоне 0,1...0,3.
![]() Используя полученные знания о связи между заданной частотой вращения,
степенью неравномерности и параметрами пружины измерителя скорости, можно
рассмотреть некоторые типовые схемы регуляторов прямого действия. Поскольку в
таких регуляторах движение муфты измерителя передается непосредственно управляющему
органу двигателя (рейке топливного насоса, дросселю, дозатору и т.п.), все
зависимости, выведенные для измерителя скорости, относятся и к регулятору в
целом.
Используя полученные знания о связи между заданной частотой вращения,
степенью неравномерности и параметрами пружины измерителя скорости, можно
рассмотреть некоторые типовые схемы регуляторов прямого действия. Поскольку в
таких регуляторах движение муфты измерителя передается непосредственно управляющему
органу двигателя (рейке топливного насоса, дросселю, дозатору и т.п.), все
зависимости, выведенные для измерителя скорости, относятся и к регулятору в
целом.
а) Однорежимные регуляторы
Как указано в п. 2.5, схемы на рис. 22 соответствуют однорежимному регулятору с постоянной настройкой. При настройке пружины измерителя, соответствующей сплошной линии Е на рис. 31, регулятор будет поддерживать частоту вращения в диапазоне от wmax до wmin .
 В прецизионном регуляторе, предназначенном
для дизель-генераторной установки, работающей на общую сеть с другими
аналогичными установками, для выравнивания нагрузки между ними необходимо
предусмотреть возможность регулировки как номи-нальной частоты вращения, так и
диапазона частот (степени нерав-номерности). Это означает, что необ-ходима
регулировка положения по вертикали и наклона линии Е (пунктирные линии
на рис. 31). Иначе говоря, требуется изменять начальную деформацию и
приведенную жесткость пружины.
В прецизионном регуляторе, предназначенном
для дизель-генераторной установки, работающей на общую сеть с другими
аналогичными установками, для выравнивания нагрузки между ними необходимо
предусмотреть возможность регулировки как номи-нальной частоты вращения, так и
диапазона частот (степени нерав-номерности). Это означает, что необ-ходима
регулировка положения по вертикали и наклона линии Е (пунктирные линии
на рис. 31). Иначе говоря, требуется изменять начальную деформацию и
приведенную жесткость пружины.
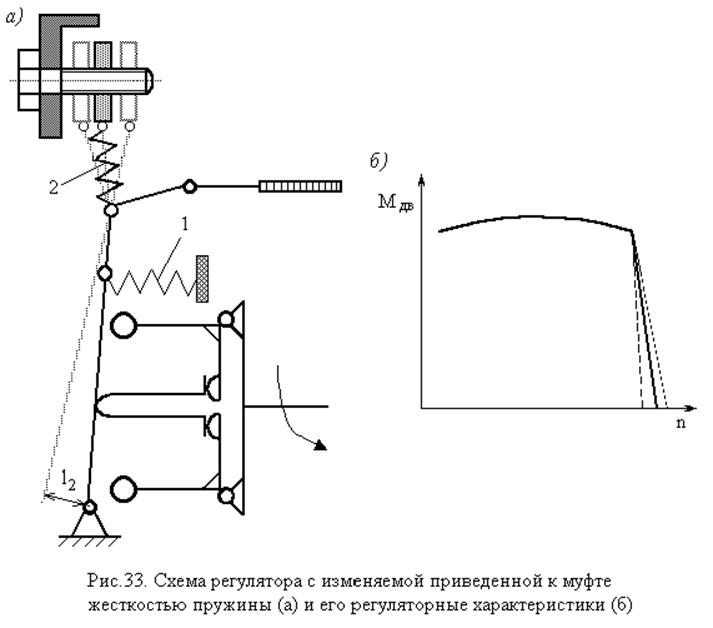
Первая функция
реализуется с помощью винтового, реечного или червячного механизма, связанного
со свободным концом пружины. Пример 
конструкции и регуляторные
характеристики показаны на рис. 32. Изменить жесткость пружины для того, чтобы
регулировать степень неравномерности, невозможно. Можно, однако, изменять приведенную
к муфте жесткость за счет изменения плеча действия пружины по отношению к
муфте. Пример такой
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.