Получить переменную
приведенную
жесткость можно, используя обычную пружину с постоянной жесткостью, за счет изменения
плеча действия усилия пружины относительно оси качания рычага,
передающего это усилие муфте. Как известно, приведенная жесткость пружины
пропорциональна квадрату отношения плеч
l2 / l1.
Таким образом, изменяя плечо
l2 с изменением затяжки пружины,
можно получить требуемое изменение приведенной жесткости, необходимое для
поддержания требуемой степени неравномерности на всех режимах.
Пример конструктивной реализации
такого принципа показан на рис. 41. Здесь механизм изменения затяжки пружины
выполнен так, что при повороте управляющего рычага 1 изменяется не только
деформация главной пружины 2, но и наклон, благодаря чему изменяется ее
плечо относительно оси качания 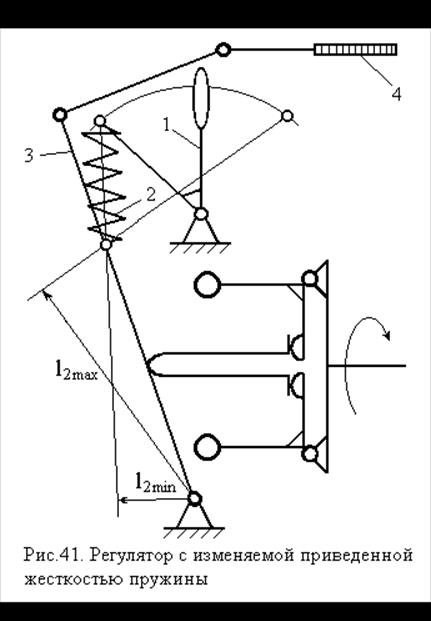 рычага 3, связанного с рейкой топливного насоса 4.
В результате происходит изменение отношения плеч (l2/l1)
от минимального при положении рычага 1, соответ-ствующего минимальной
скорости, до максимального при номиналь-ной частоте вращения. Тем самым
достигается необходимое измене-ние жесткости главной пружины 2,
приведенной к муфте измерителя. При проектировании такого ме-ханизма не следует
забывать, что восстанавливающая сила Е пру-жины 1, приведенная к
муфте измерителя скорости, также растет пропорционально отношению l2/l1.
рычага 3, связанного с рейкой топливного насоса 4.
В результате происходит изменение отношения плеч (l2/l1)
от минимального при положении рычага 1, соответ-ствующего минимальной
скорости, до максимального при номиналь-ной частоте вращения. Тем самым
достигается необходимое измене-ние жесткости главной пружины 2,
приведенной к муфте измерителя. При проектировании такого ме-ханизма не следует
забывать, что восстанавливающая сила Е пру-жины 1, приведенная к
муфте измерителя скорости, также растет пропорционально отношению l2/l1.
 Недостаток этого варианта – отно-сительная
сложность конструкции и увеличенные габариты.
Недостаток этого варианта – отно-сительная
сложность конструкции и увеличенные габариты.
Компромиссным решением
является ступенчатое изменение приведенной жесткости за счет
использования двух или нескольких пружин, подключаемых к работе по мере
увеличения заданного скоростного режима. Этот принцип иллюстрируется схемой на
рис. 42, а. Пружина 1 постоянно закреплена на управляющем рычаге 4
и действует на муфту 5, начиная с самых малых скоростей. Пружины 2
и 3 установлены так, что в крайнем левом положении управляющего рычага 4
они находятся в свободном положении. По мере поворота рычага 4 вправо в
работу вступает сначала пружина 2, затем пружина 3, так что суммарная
жесткость пружин увеличивается от малых скоростей к большим. Жесткости
отдельных пружин и моменты их включения в работу выбираются с таким расчетом,
чтобы в диапазоне режимов, где действуют соответственно одна, две или три
пружины, степень неравномерности не опускалась ниже рациональной величины
(подробнее о выборе этой величины см. ниже, в разделе 2.8) и не выходила за
установленный верхний предел (35 %). Кривые 1, 2, 3 на
рис. 42, б соответствуют работе одной, двух и трех пружин.