Схемы регуляторов с жесткой обратной связью показаны на рис. 61. На рис. 61, а представлен регулятор с кинематической обратной связью. При нарушении равенства моментов двигателя и сопротивления приводного агрегата изменяется частота вращения и, следовательно, центробежная сила грузов. Возникающая разность центробежной и восстанавливающей сил перемещает муфту измерителя и через рычаг - золотник гидроусилителя. Жидкость, поступающая в одну из управляющих полостей гидроусилителя и вытекающая из другой, перемещает поршень и соединенную с ним рейку топливного насоса в направлении, изменяющем подачу топлива и момент двигателя так, чтобы уменьшить возникшую разность моментов. Одновременно поршень через рычаг обратной связи возвращает золотник в равновесное положение, при котором пояски золотника перекрывают каналы, ведущие к управляющим полостям. Новый установившийся режим наступает, когда будут выполнены условия Мдв = Мс, Е = С и s = 0 (каналы к управляющим полостям закрыты). Как показывает рис. 61, последние два условия могут быть выполнены, только если каждому положению поршня соответствует новое положение муфты измерителя скорости, что возможно только при новом значении частоты вращения. Иначе говоря, жесткая кинематическая обратная связь обеспечивает устойчивую работу системы только при наличии некоторой степени неравномерности, как и в системе с регулятором прямого действия. Это положение иллюстрируется графиком на рис. 62, а.
Как отмечалось выше, в системах
с жесткой кинематической обратной связью, выполненной в виде суммирующего
рычага, ось золотника гидро-усилителя смещена относительно оси измерителя
скорости. В системах с жесткой силовой обратной связью, как показывают рис. 61,
б, в, золотник и измеритель скорости могут быть соосны. Перемещение
поршня гидроусилителя воздействует не на положение золотника, а на затяжку
пружины измерителя 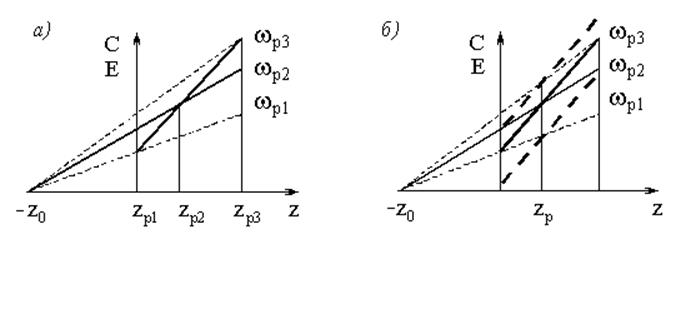
скорости. В схеме, показанной
на рис. 61, б, поршень связан с главной пружиной измерителя скорости. На
рис. 61, в более удобные условия компоновки регулятора достигаются за
счет применения дополнительной пружины. Деформация этой пружины при
перемещениях поршня создает дополнительное усилие, суммируемое с усилием
главной пружины и изменяющее суммарную величину восстанавливающей силы. В таких
системах равновесный режим возможен только при единственном положении золотника
гидроусилителя и связанной с ним муфты измерителя. Однако изменение
восстанавливающей силы приводит к тому, что это положение достигается, согласно
условию С=Е, при различных значениях частоты вращения вала измерителя
скорости. Иными словами, здесь, как и при кинематической обратной связи,
каждому положению рейки топливного насоса соответствует свое значение
равновесной частоты вращения, что иллюстрируется на
рис. 62, б.
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.