 Как показывает диаграмма на рис. 53, для
выхода из зоны неустойчивой работы (НУ) в зону затухающих колебаний (ЗК) требуется
увеличивать степень неравномерности и/или отношения времен Ta/Tr
и Tk/Tr. Первый путь, как
правило, неприемлем, поскольку степень неравномерности определяется требованиями
к установке. В равной мере нежелательно увеличение времени разгона двигателя.
Время вязкого трения в малой степени поддается изменению конструктивными средствами.
Таким образом, наиболее доступным средством повышения устойчивости является
уменьшение времени измерителя, т. е. его масс, связанных с муфтой измерителя.
Последнее возможно, в частности, с помощью увеличения частоты вращения вала измерителя,
но такой путь улучшения динамических свойств системы ограничивается допустимыми
окружными скоростями вращения грузов.
Как показывает диаграмма на рис. 53, для
выхода из зоны неустойчивой работы (НУ) в зону затухающих колебаний (ЗК) требуется
увеличивать степень неравномерности и/или отношения времен Ta/Tr
и Tk/Tr. Первый путь, как
правило, неприемлем, поскольку степень неравномерности определяется требованиями
к установке. В равной мере нежелательно увеличение времени разгона двигателя.
Время вязкого трения в малой степени поддается изменению конструктивными средствами.
Таким образом, наиболее доступным средством повышения устойчивости является
уменьшение времени измерителя, т. е. его масс, связанных с муфтой измерителя.
Последнее возможно, в частности, с помощью увеличения частоты вращения вала измерителя,
но такой путь улучшения динамических свойств системы ограничивается допустимыми
окружными скоростями вращения грузов.
Еще более сложно перевести
систему из зоны затухающих колебаний в зону монотонно сходящихся или
апериодических переходных процессов
(М или А), хотя именно такой тип переходных процессов наиболее желателен для
систем с особо жесткими требованиями к динамике, в первую очередь для генераторных
установок. Как показывает диаграмма, при этом требуются достаточно высокие
значения коэффициента Y, в противном случае увеличение коэффициента Х
окажется бесполезным. При заданной степени неравномер-ности повышение этого
коэффициента достижимо только за счет отношения Та/Тr.
Следовательно, при проектировании систем автоматического регулирования скорости
необходимо принимать все доступные меры для уменьшения движущихся масс
измерителя. В отдельных случаях, при необходимости существенно улучшить динамические
характеристики установки без переделки регулятора приходится идти на повышение
момента инерции двигателя (времени его разгона), жертвуя при этом
массогабаритными показателями и приемистостью.
Повышение мощности двигателей обычно связано с увеличением необходимой работоспособности регулятора. В свою очередь, это влечет за собой увеличение масс грузов для достижения необходимой центробежной силы. Поэтому, чем больше мощность двигателя, тем сложнее удовлетворять требования к динамике системы. Именно это определяет применение на двигателях большой мощности регуляторов непрямого действия, у которых величина перестановочного усилия не связана с параметрами измерителя скорости.
В регуляторах непрямого
действия перемещение муфты измерителя скорости преобразуется в управляющее
воздействие - перемещение
рейки топливного насоса - с
помощью усилительного устройства, которым в современных регуляторах скорости
обычно является гидроусилитель. Типичные схемы гидроусилителей показаны на рис.
54. Наиболее наглядной для изучения является схема с двумя управляющими
полостями, рис. 54, а. Здесь ведущим элементом является золотник А,
обычно связываемый с муфтой измерителя скорости. Во входной канал
гидроусилителя подается жидкость (обычно масло) под давлением р0.
Гидроусилитель находится в равновесном положении, когда пояски золотника
перекрывают каналы, подводящие масло в управляющие полости. При перемещении
золотника в направлении ±s (на рисунке за положительное принято
направление, указанное стрелкой) через один из каналов (в данном случае - левый) в соответствующую полость
подается жидкость, одновременно противоположная полость соединяется с полостью
слива. Разность давлений р1 и р2
вызывает перемещение поршня со штоком В в направлении х. При этом
перемещается и рейка топливного насоса. Достоинством такой схемы является
равенство усилий в обоих направлениях, недостатком - необходимость абсолютно точной
установки обоих поясков золотника относительно соответствующих каналов, что
достаточно сложно выполнить технологически. В этом отношении более удобны схемы
с дифференциальным поршнем (рис. 54, б) и с одной управляющей полостью и
возвратной пружиной (рис. 54, в). В первом случае правая полость
постоянно соединена с подводом жидкости, а левая, в зависимости от направления
движения золотника, соединяется либо с подводом жидкости, либо со сливом. В
первом случае давление, действующее на большую площадь, вызывает движение
поршня вправо, во втором давление в правой полости перемещает поршень влево.
Второй поясок золотника служит только как направляющий и уплотняющий. В схеме с
возвратной пружиной правая полость постоянно соединена со сливом, т.е. в ней
отсутствует избыточное давление. При движении золотника влево в левую полость
подается давление, перемещающее поршень вправо, при противоположном движении
управляющая полость сообщается со сливом, давление в ней падает и пружина перемещает
поршень 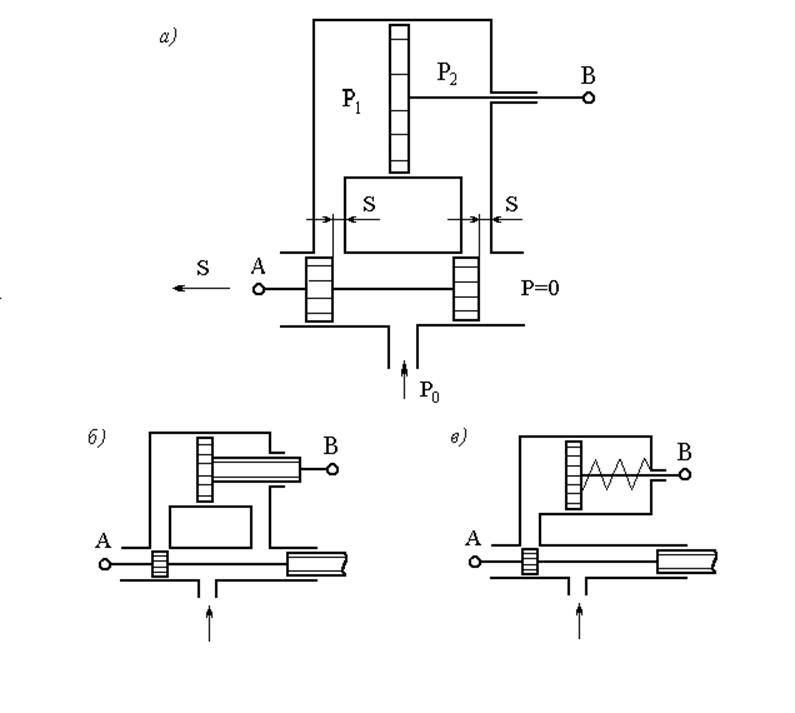
влево. В таких схемах рейку
топливного насоса соединяют со штоком В таким образом, чтобы под
действием возвратной пружины подача топлива уменьшалась. Благодаря этому при
падении давления жидкости пружина отключает подачу, что вызывает остановку
двигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.