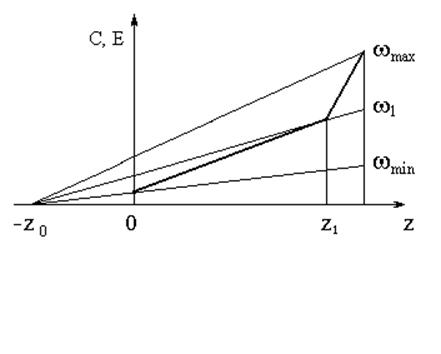
Одновременное выполнение требований об ограничении степени неравномерности и обеспечении устойчивой работы на всех режимах сталкивается с определенными трудностями. Как показано в разделе "Статика центробежного измерителя скорости", фактор устойчивости измерителя пропорционален степени неравномерности, поэтому малая степень неравномерности сопряжена с недостаточной устойчивостью, в особенности при малом коэффициенте самовыравнивания объекта (подробнее это будет рассмотрено в разделе "Динамика систем автоматического регулирования скорости"). Как отмечалось в разделе "Статика объекта регулирования", у автотракторных двигателей наименее устойчивы режимы, близкие к холостому ходу. Исходя из этого, наиболее благоприятна форма регуляторной ветви, показанная на рис. 38, а, где местная степень неравномерности δм вблизи холостого хода превышает общую степень неравномерности δ. Однако реализовать такую форму регуляторной ветви с плавно повышающейся местной степенью неравномерности весьма сложно. Более реальна конфигурация регуляторной ве-тви, показанная на рис. 38, б, где в некоторой точке 1 происходит изменение наклона регуляторной ветви. Добиться такого эффекта можно, увеличивая в точке 1, характеризуемой частотой враще-ния ω1 и ходом муфты z1, жесткость пружины, как показано на рис. 39. Это достаточно просто осуществляется с помощью под-пружиненного упора 5 (рис. 37), в который упирается рычаг 4, связанный с рейкой топливного насоса, в положении, показанном пунктиром и соответствующем точке 1 на рис. 38, б. Таким образом, на участке хода муфты от положения максимальной подачи до точки 1 действует только главная пружина, а затем подключается пружина упора, жесткость которой суммируется с жесткостью главной пружины. Подбирая положение упора 5 (рис. 37), который обычно называют корректором холостого хода, и жесткость его пружины, можно получить требуемую устойчивость в заданном диапазоне нагрузок.
 Выполнение требования
об ограничении степени неравномерности во всем рабочем диапазоне скоростных
режимов весьма затруднительно без специальных конструктивных мероприятий.
Пользуясь формулой степени неравномерности, выведенной в разделе "Статика
центробежного измерителя скорости", можно видеть, что при реальных
значениях параметров регулятора и постоянной жесткости главной пружины степень
неравномерности превышает 0,35 уже при частоте вращения 0,7...0,5 от
номинальной. Чтобы ограничить ее рост, необходима переменная жесткость
пружины, понижающаяся при переходе к малым частотам вращения, т.е. при
уменьшении затяжки пружины. Наиболее распространены следующие пути решения
этой инженерной задачи.
Выполнение требования
об ограничении степени неравномерности во всем рабочем диапазоне скоростных
режимов весьма затруднительно без специальных конструктивных мероприятий.
Пользуясь формулой степени неравномерности, выведенной в разделе "Статика
центробежного измерителя скорости", можно видеть, что при реальных
значениях параметров регулятора и постоянной жесткости главной пружины степень
неравномерности превышает 0,35 уже при частоте вращения 0,7...0,5 от
номинальной. Чтобы ограничить ее рост, необходима переменная жесткость
пружины, понижающаяся при переходе к малым частотам вращения, т.е. при
уменьшении затяжки пружины. Наиболее распространены следующие пути решения
этой инженерной задачи.
Возможно использование пружин с переменной жесткостью. Таким свойством обладают пружины с переменным диаметром или с переменным шагом (рис. 40, а, б). При малых начальных деформациях пружины, соответствующих минимальным скоростным режимам, работают витки, имеющие минимальную жесткость, которая и определяет степень неравномерности. По мере увеличения затяжки пружины "слабые" витки сжимаются до соприкосновения друг с другом и выключаются из работы. Далее работают более жесткие витки, так что результирующая жесткость пружины плавно повышается от малых частот вращения к большим. Подбором параметров пружины можно обеспечить необходимый график зависимости степени неравномерности от заданной частоты вращения. К сожалению, изготовление таких пружин представляет значительные технологические трудности, поэтому такое решение применяется только в измерителях регуляторов непрямого действия, где требуемые перестановочные усилия минимальны, а пружины имеют малые диаметры навивки и сечения проволоки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.