 |
|||
И учитываем, что
Тогда окончательный вид уравнения

Слагаемое, учитывающее сухое
трение,

делает данное уравнение
нелинейным. Если пренебречь им, то получим линейное дифференциальное уравнение,
которое может быть преобразовано по Лапласу
(Tr2p2 + Tk p + δr)η(p) = φ(p), откуда передаточная функция
W(p) = 1/(Tr2p2 + Tk p + δr).
Передаточная функция показывает, что при положительной степени неравномерности δr измеритель скорости является звеном второго порядка, которое, как известно, может быть колебательным или апериодическим. При нулевой степени неравномерности это звено вырождается в последовательное соединение интегрирующего и апериодического звеньев.
 |
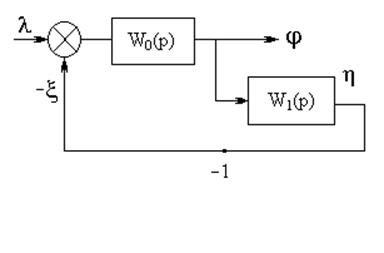
 а W1(p) - регулятор скорости, передаточная
функция которого в данном случае совпадает с переда-точной функцией измерителя
скорости, при этом время измерителя опре-деляется с учетом масс элементов
топливного насоса, движущихся при перемещениях муфты измерителя. Его
передаточная функция
а W1(p) - регулятор скорости, передаточная
функция которого в данном случае совпадает с переда-точной функцией измерителя
скорости, при этом время измерителя опре-деляется с учетом масс элементов
топливного насоса, движущихся при перемещениях муфты измерителя. Его
передаточная функция
W1(p) = 1/(Tr2p2 + Tk p + δr).

Усилительное звено с
коэффициентом (-1)
означает связь между выходом измерителя и рейкой топливного насоса.
Передаточная функция системы

После приведения к общему знаменателю и упрощений передаточная функция
Из этой передаточной функции можно определить степень неравномерности системы:
δ = δr/(δrβ+1).
При нулевом самовыравнивании степень неравномерности системы равна степени неравномерности измерителя скорости. При положительном самовыравнивании степень неравномерности системы несколько меньше, однако при малых значениях степени неравномерности величина δrβ значительно меньше единицы, так что ее влияние незначительно.
![]()
Для анализа устойчивости рассматриваем характеристическое уравнение
![]()
Коэффициенты
характеристического уравнения:
Необходимое условие устойчивости a0>0, а1>0, а2>0, а3>0 выполняется в соответствии с физическим смыслом коэффициентов характеристического уравнения, если δr >0. При нулевой степени неравномерности измерителя это условие устойчивости может быть выполнено, только если коэффициент самовыравнивания положительный. Этим, однако, устойчивость не гарантии-руется. Для точной оценки устойчивости системы необходимо обратиться к одному из критериев устойчивости, изученных в курсе "Теория автома-тического управления". В данном случае удобно воспользоваться критерием Гурвица, который для систем третьего порядка имеет вид
а1а2 - а0а3 > 0.
При подстановке значений коэффициентов это условие записывается как
(TaTk + βTr2)(Taδr + Tkβ) - TaTr2(βδr+1) > 0.
При анализе дифференциального уравнения дизеля как объекта регулирования отмечалось, что обычно коэффициентом самовыравнивания можно пренебречь. Тогда условие устойчивости упрощается:
TaTkδr > Tr2 или TaTkδr /Tr2 > 1.
Отсюда вполне очевидно вытекает, что устойчивость системы регулирования скорости может быть повышена за счет увеличения, во-первых, степени неравномерности и, во-вторых, отношения времени разгона двигателя к квадрату времени измерителя скорости.
 Для более детального
анализа влияния параметров системы регулирования на устойчивость и вид
переходного процесса системы третьего порядка, каковой является рассматриваемая
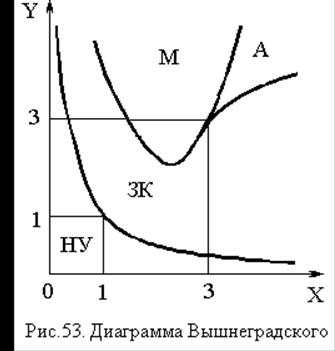
система регулирования, удобно использо-вать диаграмму Вышнеградского (рис. 53).
Для этого характеристическое уравнение А(р) = 0 преобразуется к виду
Для более детального
анализа влияния параметров системы регулирования на устойчивость и вид
переходного процесса системы третьего порядка, каковой является рассматриваемая
система регулирования, удобно использо-вать диаграмму Вышнеградского (рис. 53).
Для этого характеристическое уравнение А(р) = 0 преобразуется к виду
q3 + Xq2 + Yq + 1 = 0 ,
где X = (a1/a3)(a3/a0)2/3, Y = (a2/a3)(a3/a0)1/3.
Подстановка значений коэффициентов характеристического уравнения дает
X = (Tk/Tr)(Ta/Tr)1/3, Y = δr(Ta/Tr)2/3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.