
Затем вводим следующие обозначения:
где x – безразмерное управляющее
воздействие; j – безразмерная
скорость (управляемый параметр); l – безразмерный параметр нагрузки; Та – время разгона
двигателя; b – коэффициент
самовыравнивания. С учетом этих подстановок и полагая

получаем дифференциальное
уравнение объекта в виде:
Полученное уравнение является уравнением
апериодического звена первого порядка. При положительном самовыравнивании, заменяя
Ta/b
= T (время
двигателя) и 1/b=k (коэффициент усиления), получаем в
преобразованном по Лапласу виде:
(Tр+ 1)j(p) = k(x – l).
Передаточная функция такого звена:
W0(p) = k/(Tp + 1).
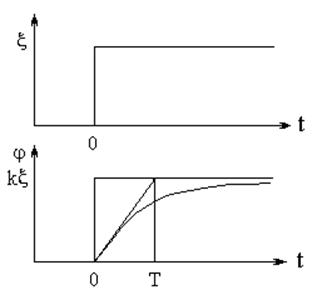
При мгновенном изменении управля-ющего воздействия от 0 до x решение дифференциального уравнения звена:
 j = kx(1 – exp(-t/T)).
j = kx(1 – exp(-t/T)).
График переходной функции показан на рис. 10.
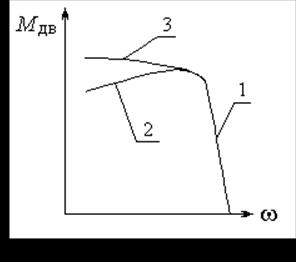
При наличии регулятора скорости статические характеристики двигателя существенно изменяются по сравнению с приведенными на рис. 3. Регулятор скорости устанавливает величину подачи в соответствии с изменением нагрузки, поддерживая с определенной погрешностью заданную частоту вращения. Зависимость крутящего момента двигателя от частоты вращения при постоянном положении органа, управляющего регулятором (задающего требуемую частоту вращения), называется регуляторной характеристикой.
При изменении нагрузки на
валу двигателя от нулевой (холостой ход) до номинальной регулятор управляет
подачей так, что скорости изменяются в заданном узком диапазоне. На
регуляторной характеристике эти режимы образуют регуляторную ветвь 1
(рис. 11). Если нагрузка превышает номинальную, ограничительное устройство не
позволяет перемещать далее орган управления подачей. Дальнейший рост нагрузки
приводит к уменьшению частоты вращения. Подача топлива при этом изменяется либо
в соответствии с характе-ристикой топливоподачи (при постоянном положении
управляющего органа), либо с некоторым изменением положения последнего за счет
специального устройства (корректора). Соответствующие режимы образуют ограничи- тельную ветвь регуляторной характеристики, которая
либо совпадает со скоростной характеристикой двигателя без регулятора (кривая 2),
либо проходит несколько выше ее (корректорная ветвь, кривая 3).
тельную ветвь регуляторной характеристики, которая
либо совпадает со скоростной характеристикой двигателя без регулятора (кривая 2),
либо проходит несколько выше ее (корректорная ветвь, кривая 3).
 В зависимости от
назначения двигателя и конструкции регулятора возможны одна, две или несколько
регуляторных ветвей. Соответственно ограничительных ветвей также может быть несколько,
если конструкция регулятора предусматривает ручное регулирование.
В зависимости от
назначения двигателя и конструкции регулятора возможны одна, две или несколько
регуляторных ветвей. Соответственно ограничительных ветвей также может быть несколько,
если конструкция регулятора предусматривает ручное регулирование.
 1. По физическому принципу
измерения скорости регуляторы различаются на механические, гидравлические,
пневматические и электрические.
1. По физическому принципу
измерения скорости регуляторы различаются на механические, гидравлические,
пневматические и электрические.
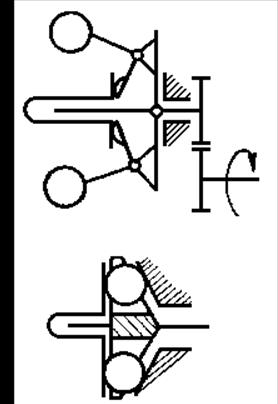
 Механические. Скорость измеряется по величине
механического усилия, зависящего от частоты вращения. Наиболее распространенные
измерители скорости такого типа – центробежные, где мерой скорости является
центробежная сила, действующая на эксцентрично расположенный груз, вращающийся
вокруг оси с частотой вращения, пропорциональной частоте вращения вала
двигателя (рис. 12). Их достоинства – простота конструкции, надежность, точная
зависимость усилия от скорости – обусловили максимальное распространение регуляторов
скорости с центробежными измерителями.
Механические. Скорость измеряется по величине
механического усилия, зависящего от частоты вращения. Наиболее распространенные
измерители скорости такого типа – центробежные, где мерой скорости является
центробежная сила, действующая на эксцентрично расположенный груз, вращающийся
вокруг оси с частотой вращения, пропорциональной частоте вращения вала
двигателя (рис. 12). Их достоинства – простота конструкции, надежность, точная
зависимость усилия от скорости – обусловили максимальное распространение регуляторов
скорости с центробежными измерителями.

Гидравлические. Параметром, измеряющим скорость,
является давление, создаваемое при перетекании жидкости, нагнетаемой объемным
гидравлическим насосом через дроссельное отверстие (рис. 13). Насос, вращающийся
со скоростью, пропорциональной частоте вращения вала двигателя, создает расход
жидкости, пропорциональный скорости вращения.
В свою очередь этот поток жидкости, протекая через дроссельный канал, испытывает
сопротивление, пропорциональное скорости потока. Это давление воспринимается
поршнем, связанным с усилительным или непосредственно с исполнительным
устройством регулятора. Регулируя дроссельное сечение, можно изменять давление,
а следовательно, частоту вращения, на которую настраивается регулятор. Простота
и компактность являются привлекатель-ными качествами таких регуляторов.
Недостаток - зависимость
давления от вязкости жидкости, что влечет за собой нестабильность параметров
регулирования. Такими регуляторами комплектуются некоторые топливные насосы роторного
типа с регулированием подачи дросселированием топлива на впуске.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.