 (9.34)
(9.34)
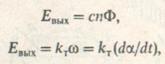
где ω — угловая скорость ротора, равная первой производной от угла поворота ротора α; kТ — коэффициент передачи тахогенератора.
Выходное напряжение тахогенератора![]() меньше ЭДС ,
меньше ЭДС , ![]() на падение напряжения в
обмотке ОГ, сопротивление которой Zr:
на падение напряжения в
обмотке ОГ, сопротивление которой Zr:
![]()
где![]() —ток в обмотке ОГ (рис. 9.27,б).
—ток в обмотке ОГ (рис. 9.27,б).
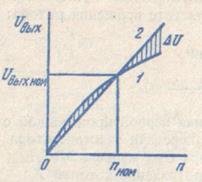
Зависимость Uвых= f(n) называют выходной
характеристикой асинхронного тахогенератора. Основными требованиями,
предъявляемыми к выходной характеристике,
являются: ее линейность, т. е. пропорциональность
между Uвых и n; постоянство фазы
вектора ![]() при изменении n;
наибольшая крутизна (отношение Uвых/n); симметрия (постоянство Uвыхпри вращении ротора в
противоположных направлениях с одинаковыми частотами); стабильность (независимость
выходной характеристики от температуры, условий эксплуатации, времени работы и т. п.).
при изменении n;
наибольшая крутизна (отношение Uвых/n); симметрия (постоянство Uвыхпри вращении ротора в
противоположных направлениях с одинаковыми частотами); стабильность (независимость
выходной характеристики от температуры, условий эксплуатации, времени работы и т. п.).
Особенно жесткие требования предъявляют к выходной характеристике тахогенераторов, работающих в счетно-решающих устройствах в дифференцирующих и интегрирующих схемах.
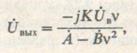
Теоретически выходное напряжение тахогенератора может быть исследовано путем анализа выражения выходной характеристики, которое в комплексной форме представляют в виде
 (9.35)
(9.35)
где ![]() — коэффициент трансформации обмоток тахогенератора [(ср.
с (9.1)]; kобм r; kобм в — обмоточные
коэффициенты генераторных обмоток ОГ и ОB; v = п/п — относительная
частота вращения ; А и В — комплексные коэффициенты, зависящие от
параметров тахогенератора, т. е. его активных и индуктивных сопротивлений.
— коэффициент трансформации обмоток тахогенератора [(ср.
с (9.1)]; kобм r; kобм в — обмоточные
коэффициенты генераторных обмоток ОГ и ОB; v = п/п — относительная
частота вращения ; А и В — комплексные коэффициенты, зависящие от
параметров тахогенератора, т. е. его активных и индуктивных сопротивлений.
Как следует из выражения (9.35), напряжение Uвых не является линейной функцией
относительной частоты вращения v. Нелинейность создает квадратичная
зависимость![]() Если
Если ![]() то Uвых пропорционально v и тахогенератор
считают идеальным. При проектировании тахогенераторов член выражения
то Uвых пропорционально v и тахогенератор
считают идеальным. При проектировании тахогенераторов член выражения ![]() стараются уменьшить
за счет уменьшения
v или
стараются уменьшить
за счет уменьшения
v или![]()
С целью уменьшения относительной частоты вращения v = рn/(6Оf) тахогенераторы проектируют на большую частоту f с наименьшим числом пар полюсов р. Обычно р ≥ 2.
|
|
|
|
Рис. 9.28. Выходные характеристики асинхронного тахогенератора |
Рис. 9.29. К пояснению реакции генераторной обмотки |
Комплексный коэффициент
![]()
где ![]() - полное сопротивление ротора тахогенератора,
приведенное к обмотке возбуждения;
- полное сопротивление ротора тахогенератора,
приведенное к обмотке возбуждения; ![]() — активное сопротивление ротора, приведенное к обмотке
возбуждения.
— активное сопротивление ротора, приведенное к обмотке
возбуждения.
Для уменьшения коэффициента![]() стараются работать при
больших сопротивлениях
нагрузки Zп, а ротор тахогенератора с целью увеличения
стараются работать при
больших сопротивлениях
нагрузки Zп, а ротор тахогенератора с целью увеличения ![]() выполняют из материалов с большим
удельным сопротивлением (фосфористой или марганцовистой бронзы или из сплавов типа
манганин, нейзильбер).
выполняют из материалов с большим
удельным сопротивлением (фосфористой или марганцовистой бронзы или из сплавов типа
манганин, нейзильбер).
К уменьшению Kи Zобычно не прибегают, так как первое снижает крутизну выходной характеристики, а второе - увеличивает габариты тахогенератора.
Отклонение реальной (рис. 9.28, кривая 1) выходной характеристики ![]() от идеальной (рис.
9.28, кривая 2) называют амплитудной (скоростной) погрешностью ∆Uтахогенератора.
Амплитудную погрешность определяют как отношение (выраженное в процентах)
отклонения реальной выходной характеристики от идеальной к максимальной ЭДС генераторной обмотки Eвых max
от идеальной (рис.
9.28, кривая 2) называют амплитудной (скоростной) погрешностью ∆Uтахогенератора.
Амплитудную погрешность определяют как отношение (выраженное в процентах)
отклонения реальной выходной характеристики от идеальной к максимальной ЭДС генераторной обмотки Eвых max
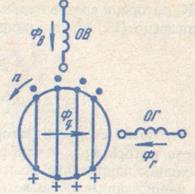
Фактически наличие амплитудной погрешности можно объяснить целым рядом факторов. Во-первых, падением напряжения в выходной (генераторной) обмотке lrZr; во-вторых, уменьшением магнитного потока Фqвследствие размагничивающего действия магнитного потока реакции генераторной обмотки Фr (рис. 9.29); в-третьих, отклонением магнитного потока Фq от поперечной оси (рис. 9.30) из-за изменения индуктивного сопротивления рассеяния ротора, которому соответствует поток рассеяния Фd2.Этот поток создается токами ротора, возникающими от ЭДС вращения в результате пересечения ротором магнитного потока Фq в направлении, показанном на рис. 9.31. Кроме того, амплитудная погрешность возникает при изменении тока возбуждения Iв, а следовательно, и магнитного потока Фв в результате действия дополнительной ЭДС, наведенной в обмотке возбуждения потоком Фd2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.