Приведенный к валу двигателя момент трения где ip, ηр-передаточное число и КПД редуктора [10].
3. Моментом вязкого трения называют нагрузочный момент Мс = = kωc(рис. 15.7, в).
4.
Зависимость нагрузочного момента от угловой скорости, напри мер вентилятора,
центробежного насоса, гребного и воздушного винта, имеет вид, показанный на
рис. 15.1,г. Такой нагрузочный момент описывают формулой![]() где
где![]() и
называют вентиляторным.
и
называют вентиляторным.
5. Часто нагрузочный момент зависит от угла поворота механизма θc его положения. Такой момент называют позиционным. Характерной нагрузкой является радиолокационная антенна, момент сопротивления которой зависит от ее положения относительно направления ветра (рис. 15.7,д). Поэтому в некотором диапазоне углов поворота механизма позиционный момент может принимать отрицательные значения, т. е. помогать двигателю вращать антенну. К этому же типу механизмов относятся приводы рулей летательных аппаратов, момент сопротивления которых зависит от угла отклонения руля в шарнире и называется шарнирным.
6. В системах автоматики, где определяющую роль играет длительность переходных процессов (разгон, торможение), основным моментом, нагружающим двигатель, является динамический момент Mдин = =J'(dω/dt), где J'-суммарный момент инерции, приведенный к валу двигателя; dω/dt-ускорение вала двигателя. Характерными нагрузками являются различного вида следящие системы (стрелково-пушечные турели, приводы копировально-фрезерных станков, приводы радиолокационных антенн и т. п.).
|
|
|
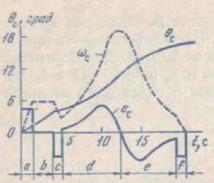
Рис. 15.8. Характеристики движения антенны радиолокатора по азимуту при слежении за самолетом |
На рис. 15.8 приведены типовые характеристики движения антенны радиолокатора по азимуту при слежении за самолетом. Участок а соответствует пуску и разгону привода до скорости равномерного вращения, участок b — равномерному вращению (круговой обзор) до момента захвата цели локатором, участок с — торможению двигателя до скорости, равной скорости слежения за приближающимся самолетом. На участке dскорость слежения возрастает, достигая максимума в момент пролета самолетом станции. На участке е скорость слежения плавно уменьшается до тех пор, пока цель не будет передана следующей станции сопровождения. Участок f соответствует торможению двигателя до полной остановки. Из графика видно, что ускорение, а следовательно, и динамический момент — положительны на участках aи d, равны нулю в режиме равномерного вращения на участке bи отрицательны на участках с, е и f.
Для следящих систем копировальных станков и станков с программным управлением по заданному профилю обработки детали можно построить график линейного перемещения суппорта или каретки станка во времени, а затем графическим дифференцированием получить требуемые кривые скорости перемещения и ускорения, аналогичные рис. 15.8.
§ 15.4. Общие сведения по выбору двигателя
Выбор двигателя для привода различных систем автоматики является одним из основных этапов проектирования системы. Это объясняется тем, что двигатель, с одной стороны, определяет тип, параметры и мощность предшествующих каскадов усилителей, а также мощность источника энергии и пускорегулирующей аппаратуры. С другой стороны, именно от двигателя зависят динамические качества системы, которые он в состоянии обеспечить. Никакая система управления, никакие корректирующие устройства не могут создать требуемые вращающие моменты, угловые скорости и ускорения механизма, если они не обеспечены энергетикой самой конструкции силового, конечного узла системы, каким является двигатель.
Двигатель выбирают по следующим показателям: роду тока, номинальным напряжению, мощности и частоте вращения, жесткости (мягкости) характеристики, регулировочным свойствам и т. п. Стремятся выбрать наиболее простой двигатель по устройству и управлению, надежный и имеющий наименьшие мощность, массу, стоимость. Вместе с тем двигатель должен полностью обеспечить выполнение системой автоматики ее функций.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.