§ 13.9. Принцип действия и особенности вентильных двигателей
Отмеченные в первых главах преимущества двигателей постоянного то ка (хорошие регулировочные свойства, большой пусковой момент и др.) сопровождаются, к сожалению, такими недостатками, как малый срок службы, повышенная чувствительность к воздействиям окружающей среды, образование щеточной пыли и т. п. Эти недостатки связаны с наличием контакта в щеточно-коллекторном узле. Достижения полу проводниковой техники позволили создать двигатель, в котором щеточ но-коллекторный узел заменен бесконтактным переключателем (комму татором) на транзисторах или других полупроводниковых приборах, работающих в так называемом ключевом режиме. Такие двигатели по лучили название вентильных или бесконтактных двигателей постоян ного тока.
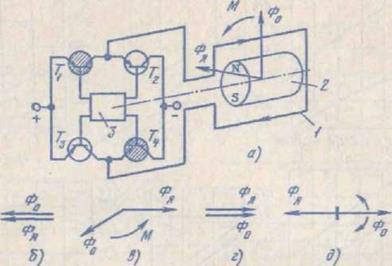
Как правило, бесконтактный двигатель постоянного тока (БДПТ) имеет инверсное исполнение, т. е. обмотку якоря располагают в пазах статора, а ротор представляет собой постоянный магнит с одной или двумя парами полюсов. Принцип действия такого двигателя удобно по яснить на схеме рис. 13.21,а, аналогичной схеме рис. 1.1, в которой два полукольца коллектора заменены транзисторными ключами Т1 — Т4 управляемыми датчиком положения ротора (ДПР).
|
|
|
Рис. 13.21. К пояснению принципа работы вентильного двигателя : 1 - обмотка якоря ; 2 — ротор ;3 - датчик положения ротора |
Пусть Т1
н Т4 открыты, а Т2 и Т3 заперты и от
источника постоянного тока по витку (обмотке) течет ток, создающий (по правилу
буравчика) магнитный поток якоря ![]() Предположим, что ротор
находится в положении, когда вектор его основного потока
Предположим, что ротор
находится в положении, когда вектор его основного потока![]() ,
являющегося по током возбуждения, направлен вверх (ср. § 12.2). При таком
расположении векторов магнитных потоков на ротор действует вращающий момент М
и ротор стремится повернуться так, чтобы потоки
,
являющегося по током возбуждения, направлен вверх (ср. § 12.2). При таком
расположении векторов магнитных потоков на ротор действует вращающий момент М
и ротор стремится повернуться так, чтобы потоки ![]() и
и ![]() были направлены в одну сторону (рис. 13.21,б).
Если в этот момент времени ДПР переключит транзисторы, открыв Т2 и Т3
и закрыв Т1 и Т4, то ток в витке изменится на
противоположный, изменив направление вектора потока
были направлены в одну сторону (рис. 13.21,б).
Если в этот момент времени ДПР переключит транзисторы, открыв Т2 и Т3
и закрыв Т1 и Т4, то ток в витке изменится на
противоположный, изменив направление вектора потока ![]() на 180°.
При этом ротор, повернувшись по инерции против часовой стрелки (рис. 13.21, в),
продолжает вращаться за счет вращающего момента М, образованного
потоками
на 180°.
При этом ротор, повернувшись по инерции против часовой стрелки (рис. 13.21, в),
продолжает вращаться за счет вращающего момента М, образованного
потоками ![]() и
и ![]() ,
имеющими новое направление. Когда ротор достигнет положения, при котором потоки
направлены, как показано на рис. 13.21, г, ДПР (подобно полукольцам
коллектора) переключит ток в обмотке на прежнее направление (рис. 13.21, а) и
ротор будет продолжать вращаться.
,
имеющими новое направление. Когда ротор достигнет положения, при котором потоки
направлены, как показано на рис. 13.21, г, ДПР (подобно полукольцам
коллектора) переключит ток в обмотке на прежнее направление (рис. 13.21, а) и
ротор будет продолжать вращаться.
Очевидны
серьезные недостатки такого устройства: неравномерность вращающего момента
из-за скачкообразного изменения потока ![]() на
180°, возможность остановки ротора или отсутствие пускового момента (рис. 13.21.
б, г), а также неопределенность направления вращения ротора, если в
момент пуска его поток
на
180°, возможность остановки ротора или отсутствие пускового момента (рис. 13.21.
б, г), а также неопределенность направления вращения ротора, если в
момент пуска его поток ![]() был направлен, как показано на
рис. 13.21, д. Радикальным способом устранения этих недостатков является
переход на многосекционную обмотку. Однако это связано с увеличением числа
транзисторов и усложнением схемы. Компромиссным решением является введение
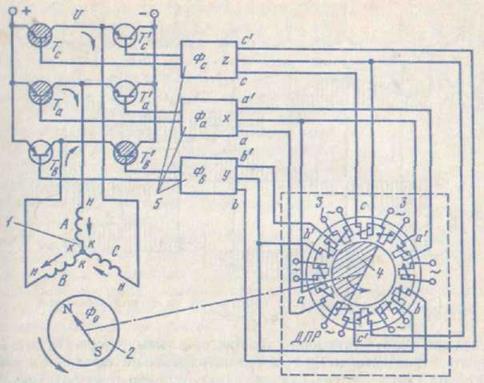
трехсекционной обмотки с коммутатором из шести транзисторов (рис. 13.22).
был направлен, как показано на
рис. 13.21, д. Радикальным способом устранения этих недостатков является
переход на многосекционную обмотку. Однако это связано с увеличением числа
транзисторов и усложнением схемы. Компромиссным решением является введение
трехсекционной обмотки с коммутатором из шести транзисторов (рис. 13.22).
Обмотка статора 1 представляет собой трехфазную обмотку, соединенную звездой (треугольником), подобно обмоткам асинхронных или синхронных машин. Ротор 2 выполнен из постоянного магнита (в общем случае ротор может быть возбужден электромагнитом). Изображенный двигатель имеет одну пару полюсов (имеются двигатели с двумя и тремя парами полюсов).
|
|
|
Рис. 13.22. Схема расположения обмоток якоря, датчика положения ротора и силовых транзисторов вентильного двигателя серии МБ |
Полупроводниковый коммутатор представляет собой управляемый инвертор, подающий напряжение к фазным обмоткам А, В и С статора в зависимости от сигналов, поступающих с датчика ДПР, который в общем случае может быть трансформаторным, емкостным, оптическим и т. п. позиционным датчиком. На рис. 13.22 изображен трансформа торный ДПР.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.