Электромагнитная система двигателя, создающая вращающееся поле, соответствующее одной паре полюсов, не является эффективной, так как магнитный поток встречает большое магнитное сопротивление, проходя по тонкому ротору. Поэтому двигатели с волновыми роторами имеют иное устройство.
У одних
двигателей обмотки выполняют так, что поток замыкается по соседним зубцам
статора, проходя по ротору сравнительно небольшие участки. Так как
электромагнитное усилие не зависит от направления потока![]() ,
то ротор притягивается к тем зубцам статора, индукция Bδпод которыми максимальна (независимо от
направления поля), обеспечивая касание со статором и при вращении поля
нормальную работу двигателя. У других двигателей магнитное поле создается с
помощью аксиально-размещенных катушек фаз статора, что обеспечивает прохождение
поля по ротору в аксиальном направлении. При гибкой связи между листами, например
с помощью эластичных колец из гибкой стали, обеспечивается эластичность
волнового ротора и хорошая работа двигателя.
,
то ротор притягивается к тем зубцам статора, индукция Bδпод которыми максимальна (независимо от
направления поля), обеспечивая касание со статором и при вращении поля
нормальную работу двигателя. У других двигателей магнитное поле создается с
помощью аксиально-размещенных катушек фаз статора, что обеспечивает прохождение
поля по ротору в аксиальном направлении. При гибкой связи между листами, например
с помощью эластичных колец из гибкой стали, обеспечивается эластичность
волнового ротора и хорошая работа двигателя.
§ 13.6. Общие сведения о шаговых двигателях
В современных системах управления, в частности в системах управления электроприводами, используют электронные вычислительные устройства, оперирующие с цифровой формой сигналов.
Цифровая форма представления сигналов управления привела к созданию нового типа двигателей - шаговых (импульсных) двигателей, которые непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи.
|
|
|
|
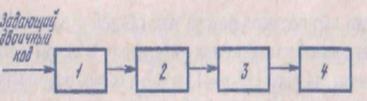
Рис. 13.8. Структурная схема разомкнутой цифровойследящей системы с ШД: I — коммутатор, преобразующий двоичный код в циклический ; 2 — усилитель импульсов ; 3 - шагоый двигатель ; 4 — нагрузка |
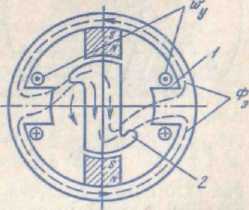
Рис. 13.9. Схема простейшего однофазного ШД |
Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода разомкнутой (рис. 13.8), обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов.
Рассмотрим принцип действия шагового двигателя (ШД) на простейшем примере однофазного шагового двигателя (рис. 13.9). Двухполюсный ротор 2 из магнитомягкого материала с клювообразными выступами помещен в четырехполюсном статоре 1. Одна пара полюсов статора представляет собой постоянные магниты, на другой паре полю сов находится обмотка управления wу,. Ротор из магнитомягкого материала является реактивным.
Пока тока в обмотке управления нет, ротор ориентируется вдоль полюсов с постоянными магнитами и удерживается около них с некоторым усилием, которое определяется магнитным потоком полюсов. При поступлении импульса на вход схемы управления (на рисунке не Показана) обмотка управления подключается к источнику напряжения постоянного тока и создает магнитный поток Фэ примерно вдвое больший, чем магнитный поток постоянных магнитов. Под действием электромагнитного усилия, создаваемого этим потоком, ротор поворачивается, преодолевая нагрузочный момент и момент, развиваемый полюсами с постоянными магнитами, стремясь занять положение, соосное с полюсами управляющей обмотки. Поворот происходит в сторону клювообразных выступов, так как магнитное сопротивление между ротором и полюсами с обмоткой в этом направлении меньше, а следовательно, усилие больше, чем в другую сторону. Следующий импульс, поступивший на вход схемы управления, отключает обмотку управления от источника напряжения и под действием потока постоянных магнитов ротор поворачивается на следующий шаг в сторону клювообразных выступов.
Одним из определяющих параметров ШД является шаг ротора, т. е. угол поворота ротора, соответствующий одному импульсу. В общем случае для двигателя с реактивным ротором шаг двигателя
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.